 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAPRAS: Plug-And-Play Robotic Arm System
Feb 19, 2023



This paper presents a novel robotic arm system, named PAPRAS (Plug-And-Play Robotic Arm System). PAPRAS consists of a portable robotic arm(s), docking mount(s), and software architecture including a control system. By analyzing the target task spaces at home, the dimensions and configuration of PAPRAS are determined. PAPRAS's arm is light (less than 6kg) with an optimized 3D-printed structure, and it has a high payload (3kg) as a human-arm-sized manipulator. A locking mechanism is embedded in the structure for better portability and the 3D-printed docking mount can be installed easily. PAPRAS's software architecture is developed on an open-source framework and optimized for low-latency multiagent-based distributed manipulator control. A process to create new demonstrations is presented to show PAPRAS's ease of use and efficiency. In the paper, simulations and hardware experiments are presented in various demonstrations, including sink-to-dishwasher manipulation, coffee making, mobile manipulation on a quadruped, and suit-up demo to validate the hardware and software design.
Learning Sparse Interaction Graphs of Partially Observed Pedestrians for Trajectory Prediction
Jul 19, 2021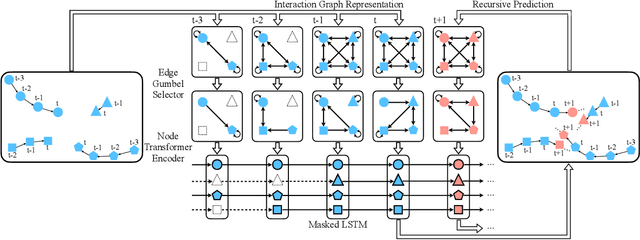
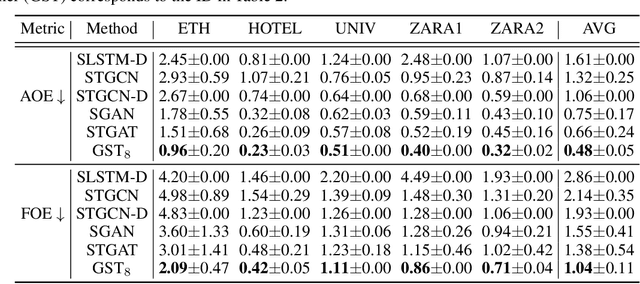
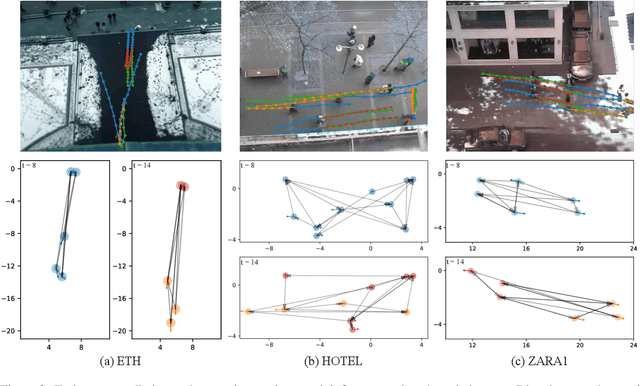
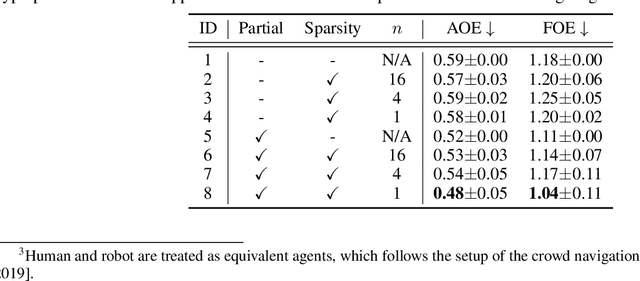
Multi-pedestrian trajectory prediction is an indispensable safety element of autonomous systems that interact with crowds in unstructured environments. Many recent efforts have developed trajectory prediction algorithms with focus on understanding social norms behind pedestrian motions. Yet we observe these works usually hold two assumptions that prevent them from being smoothly applied to robot applications: positions of all pedestrians are consistently tracked; the target agent pays attention to all pedestrians in the scene. The first assumption leads to biased interaction modeling with incomplete pedestrian data, and the second assumption introduces unnecessary disturbances and leads to the freezing robot problem. Thus, we propose Gumbel Social Transformer, in which an Edge Gumbel Selector samples a sparse interaction graph of partially observed pedestrians at each time step. A Node Transformer Encoder and a Masked LSTM encode the pedestrian features with the sampled sparse graphs to predict trajectories. We demonstrate that our model overcomes the potential problems caused by the assumptions, and our approach outperforms the related works in benchmark evaluation.