 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTRIP-Bag: A Portable Teleoperation System for Plug-and-Play Robotic Arms and Leaders
Mar 10, 2026Large scale, diverse demonstration data for manipulation tasks remains a major challenge in learning-based robot policies. Existing in-the-wild data collection approaches often rely on vision-based pose estimation of hand-held grippers or gloves, which introduces an embodiment gap between the collection platform and the target robot. Teleoperation systems eliminate the embodiment gap, but are typically impractical to deploy outside the laboratory environment. We propose TRIP-Bag (Teleoperation, Recording, Intelligence in a Portable Bag), a portable, puppeteer-style teleoperation system fully contained within a commercial suitcase, as a practical solution for collecting high-fidelity manipulation data across varied settings. With a setup time of under five minutes and direct joint-to-joint teleoperation, TRIP-Bag enables rapid and reliable data collection in any environment. We validated TRIP-Bag's usability through experiments with non-expert users, showing that the system is intuitive and easy to operate. Furthermore, we confirmed the quality of the collected data by training benchmark manipulation policies, demonstrating its value as a practical resource for robot learning.
CHILD (Controller for Humanoid Imitation and Live Demonstration): a Whole-Body Humanoid Teleoperation System
Jul 31, 2025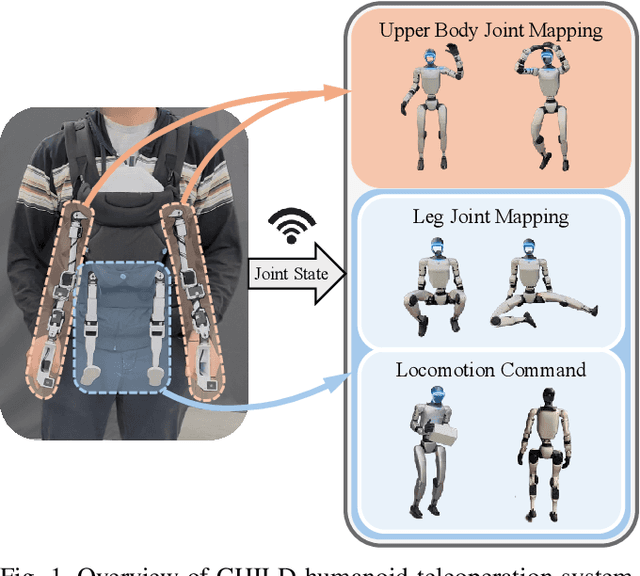
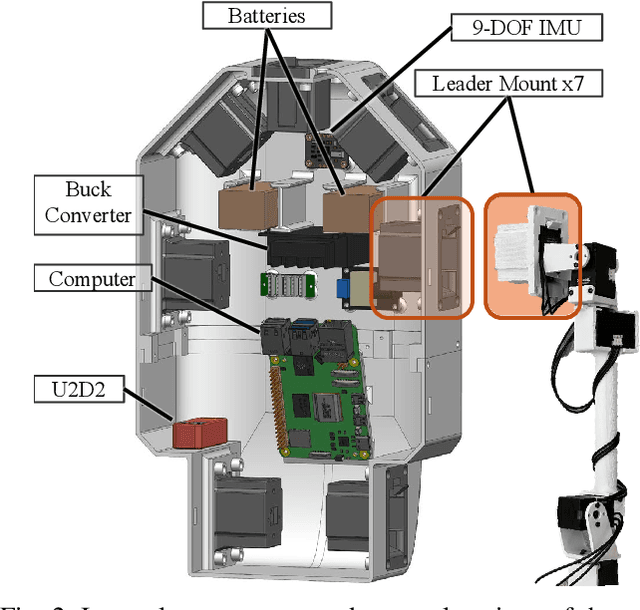
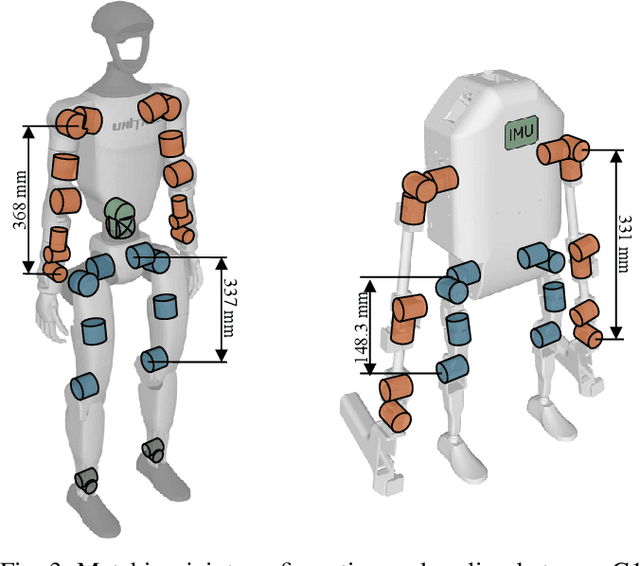
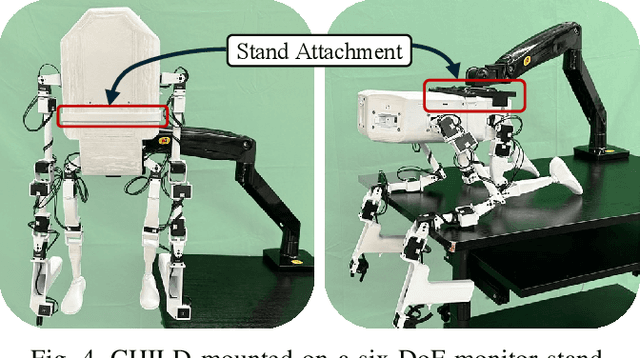
Recent advances in teleoperation have demonstrated robots performing complex manipulation tasks. However, existing works rarely support whole-body joint-level teleoperation for humanoid robots, limiting the diversity of tasks that can be accomplished. This work presents Controller for Humanoid Imitation and Live Demonstration (CHILD), a compact reconfigurable teleoperation system that enables joint level control over humanoid robots. CHILD fits within a standard baby carrier, allowing the operator control over all four limbs, and supports both direct joint mapping for full-body control and loco-manipulation. Adaptive force feedback is incorporated to enhance operator experience and prevent unsafe joint movements. We validate the capabilities of this system by conducting loco-manipulation and full-body control examples on a humanoid robot and multiple dual-arm systems. Lastly, we open-source the design of the hardware promoting accessibility and reproducibility. Additional details and open-source information are available at our project website: https://uiuckimlab.github.io/CHILD-pages.
PAPRAS: Plug-And-Play Robotic Arm System
Feb 19, 2023



This paper presents a novel robotic arm system, named PAPRAS (Plug-And-Play Robotic Arm System). PAPRAS consists of a portable robotic arm(s), docking mount(s), and software architecture including a control system. By analyzing the target task spaces at home, the dimensions and configuration of PAPRAS are determined. PAPRAS's arm is light (less than 6kg) with an optimized 3D-printed structure, and it has a high payload (3kg) as a human-arm-sized manipulator. A locking mechanism is embedded in the structure for better portability and the 3D-printed docking mount can be installed easily. PAPRAS's software architecture is developed on an open-source framework and optimized for low-latency multiagent-based distributed manipulator control. A process to create new demonstrations is presented to show PAPRAS's ease of use and efficiency. In the paper, simulations and hardware experiments are presented in various demonstrations, including sink-to-dishwasher manipulation, coffee making, mobile manipulation on a quadruped, and suit-up demo to validate the hardware and software design.
Self-Supervised Motion Retargeting with Safety Guarantee
Mar 11, 2021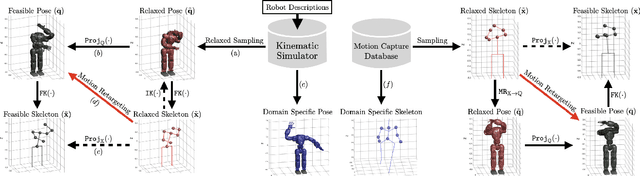
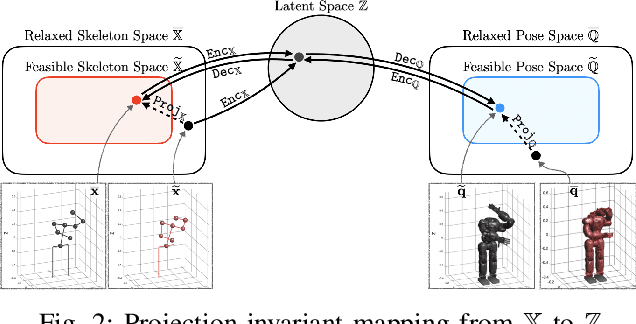

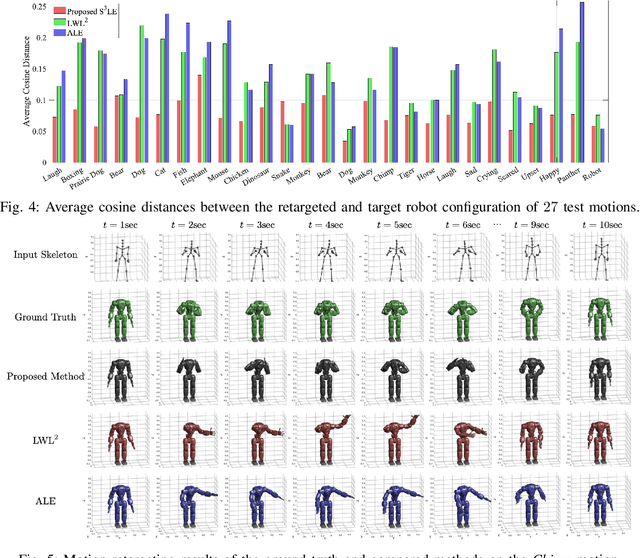
In this paper, we present self-supervised shared latent embedding (S3LE), a data-driven motion retargeting method that enables the generation of natural motions in humanoid robots from motion capture data or RGB videos. While it requires paired data consisting of human poses and their corresponding robot configurations, it significantly alleviates the necessity of time-consuming data-collection via novel paired data generating processes. Our self-supervised learning procedure consists of two steps: automatically generating paired data to bootstrap the motion retargeting, and learning a projection-invariant mapping to handle the different expressivity of humans and humanoid robots. Furthermore, our method guarantees that the generated robot pose is collision-free and satisfies position limits by utilizing nonparametric regression in the shared latent space. We demonstrate that our method can generate expressive robotic motions from both the CMU motion capture database and YouTube videos.