 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Variable Speed Object Manipulation
Feb 20, 2021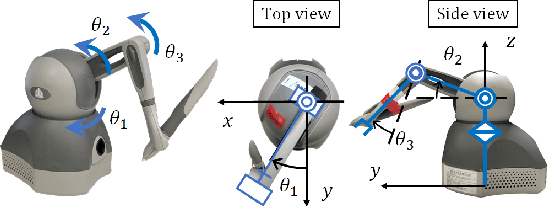

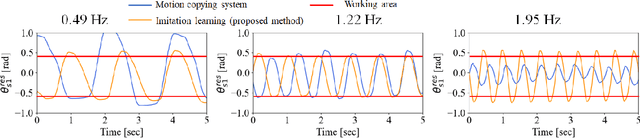
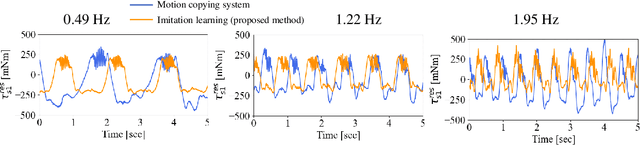
To operate in a real-world environment, robots have several requirements including environmental adaptability. Moreover, the desired success rate for the completion of tasks must be achieved. In this regard, end-to-end learning for autonomous operation is currently being investigated. However, the issue of operating speed has not been investigated in detail. Therefore, in this paper, we propose a method for generating variable operating speeds while adapting to perturbations in the environment. When the work speed changes, there is a nonlinear relationship between the operating speed and force (e.g., inertial and frictional forces). However, the proposed method can be adapted to nonlinearities by utilizing minimal motion data. We experimentally evaluated the proposed method for erasing a line using an eraser fixed to the tip of a robot. Furthermore, the proposed method enables a robot to perform a task faster than a human operator.
Time Series Motion Generation Considering Long Short-Term Motion
Sep 19, 2019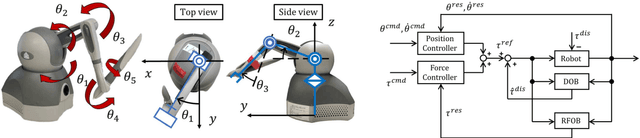
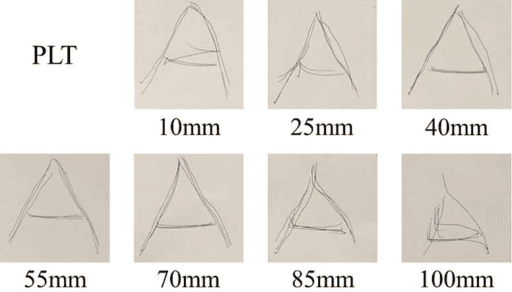
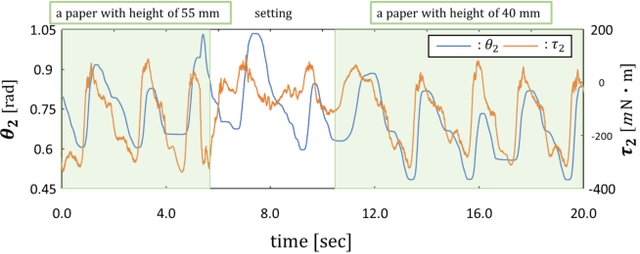
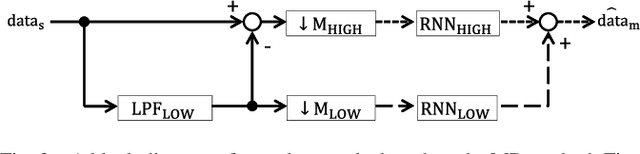
Various adaptive abilities are required for robots interacting with humans in daily life. It is difficult to design adaptive algorithms manually; however, by using end-to-end machine learning, labor can be saved during the design process. In our previous research, a task requiring force adjustment was achieved through imitation learning that considered position and force information using a four-channel bilateral control. Unfortunately, tasks that include long-term (slow) motion are still challenging. Furthermore, during system identification, there is a method known as the multi-decimation (MD) identification method. It separates lower and higher frequencies, and then identifies the parameters characterized at each frequency. Therefore, we proposed utilizing machine learning to take advantage of the MD method to infer short-term and long-term (high and low frequency, respectively) motion. In this paper, long-term motion tasks such as writing a letter using a pen fixed on a robot are discussed. We found differences in suitable sampling periods between position and force information. The validity of the proposed method was then experimentally verified, showing the importance of long-term inference with adequate sampling periods.
Imitation Learning for Object Manipulation Based on Position/Force Information Using Bilateral Control
Nov 09, 2018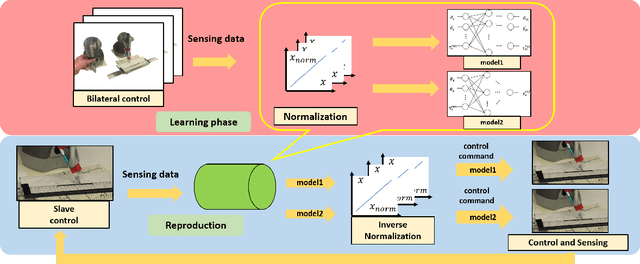
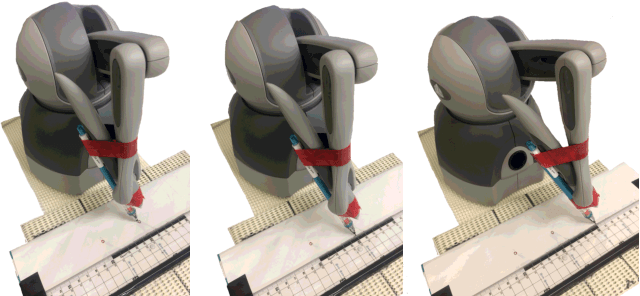
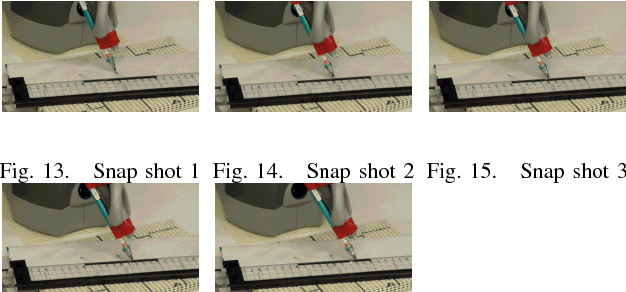
This study proposes an imitation learning method based on force and position information. Force information is required for precise object manipulation but is difficult to obtain because the acting and reaction forces cannnot be separated. To separate the forces, we proposed to introduce bilateral control, in which the acting and reaction forces are divided using two robots. In the proposed method, two models of neural networks learn a task; to draw a line along a ruler. We verify the possibility that force information is essential to imitate the human skill of object manipulation.
* 6 psges, 20 figures