Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Object Manipulation Based on Position/Force Information Using Bilateral Control
Paper and Code
Nov 09, 2018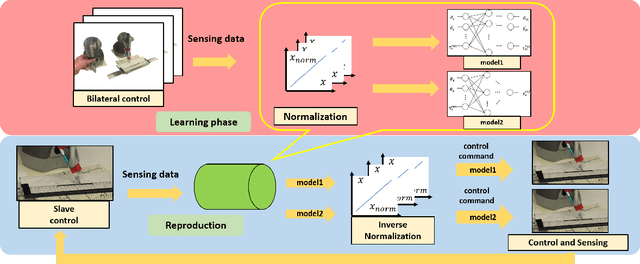
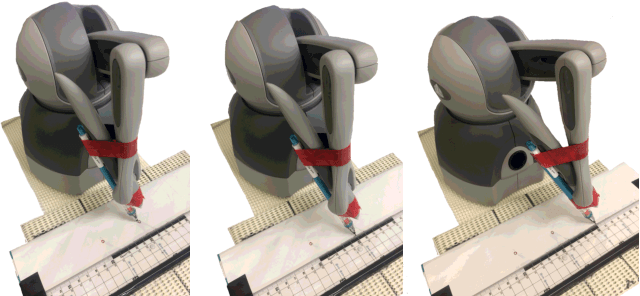
This study proposes an imitation learning method based on force and position information. Force information is required for precise object manipulation but is difficult to obtain because the acting and reaction forces cannnot be separated. To separate the forces, we proposed to introduce bilateral control, in which the acting and reaction forces are divided using two robots. In the proposed method, two models of neural networks learn a task; to draw a line along a ruler. We verify the possibility that force information is essential to imitate the human skill of object manipulation.
* 2018 IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS) Madrid, Spain, October 1-5 * 6 psges, 20 figures
View paper on