 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling Errors in X-ray Fluoroscopic Imaging Systems Using Photogrammetric Bundle Adjustment With a Data-Driven Self-Calibration Approach
Oct 19, 2018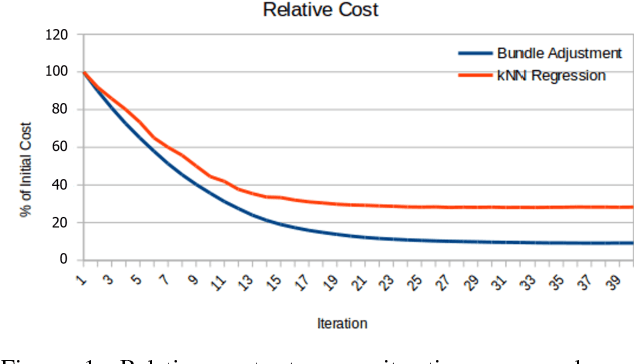
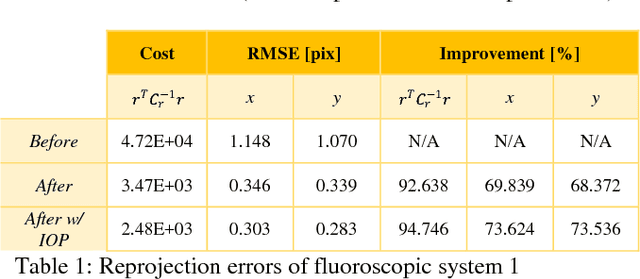

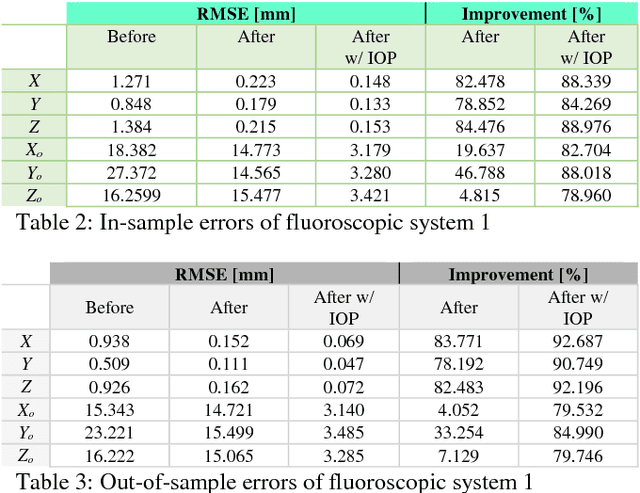
X-ray imaging is a fundamental tool of routine clinical diagnosis. Fluoroscopic imaging can further acquire X-ray images at video frame rates, thus enabling non-invasive in-vivo motion studies of joints, gastrointestinal tract, etc. For both the qualitative and quantitative analysis of static and dynamic X-ray images, the data should be free of systematic biases. Besides precise fabrication of hardware, software-based calibration solutions are commonly used for modelling the distortions. In this primary research study, a robust photogrammetric bundle adjustment was used to model the projective geometry of two fluoroscopic X-ray imaging systems. However, instead of relying on an expert photogrammetrist's knowledge and judgement to decide on a parametric model for describing the systematic errors, a self-tuning data-driven approach is used to model the complex non-linear distortion profile of the sensors. Quality control from the experiment showed that 0.06 mm to 0.09 mm 3D reconstruction accuracy was achievable post-calibration using merely 15 X-ray images. As part of the bundle adjustment, the location of the virtual fluoroscopic system relative to the target field can also be spatially resected with an RMSE between 3.10 mm and 3.31 mm.
* ISPRS TC I Mid-term Symposium "Innovative Sensing - From Sensors to Methods and Applications", 10-12 October 2018. Karlsruhe, Germany
Robot Vision: Calibration of Wide-Angle Lens Cameras Using Collinearity Condition and K-Nearest Neighbour Regression
Sep 29, 2018
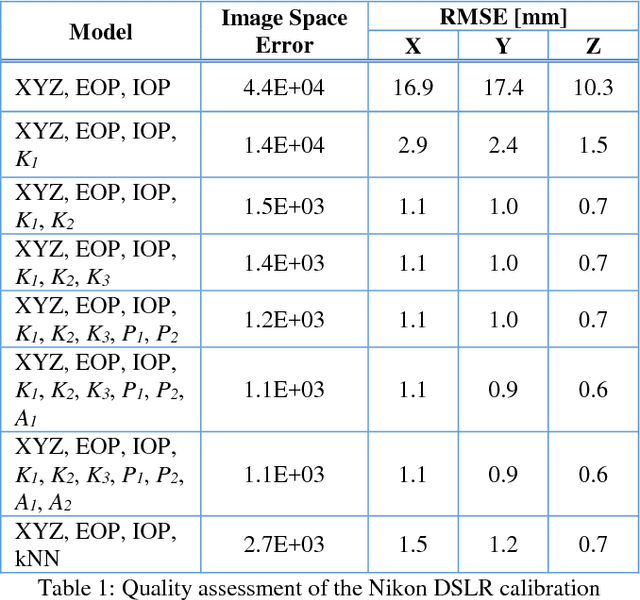
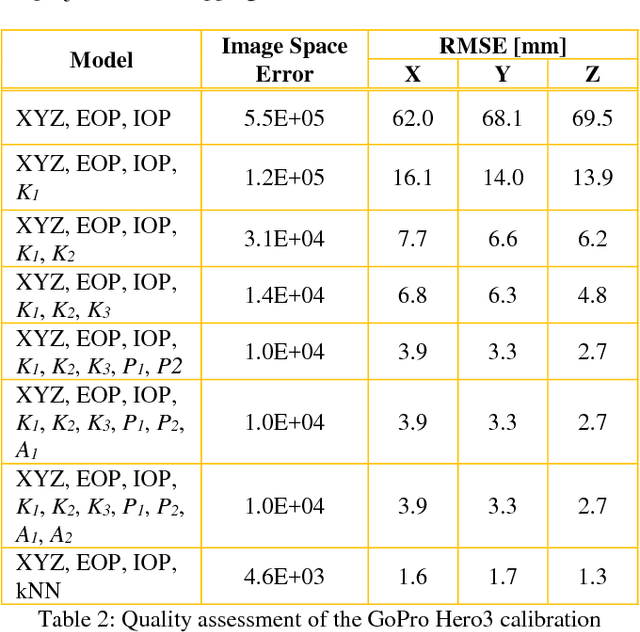
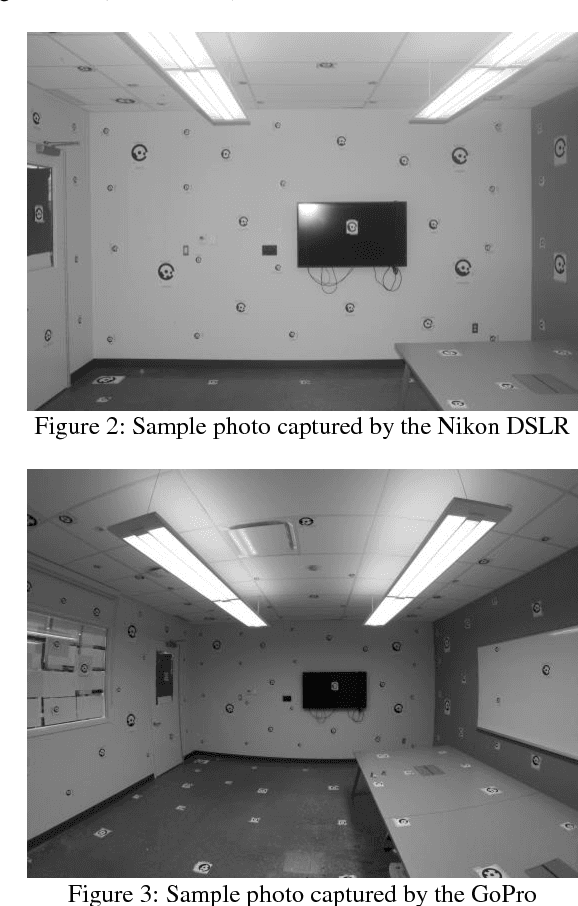
Visual perception is regularly used by humans and robots for navigation. By either implicitly or explicitly mapping the environment, ego-motion can be determined and a path of actions can be planned. The process of mapping and navigation are delicately intertwined; therefore, improving one can often lead to an improvement of the other. Both processes are sensitive to the interior orientation parameters of the camera system and mathematically modelling these systematic errors can often improve the precision and accuracy of the overall solution. This paper presents an automatic camera calibration method suitable for any lens, without having prior knowledge about the sensor. Statistical inference is performed to map the environment and localize the camera simultaneously. K-nearest neighbour regression is used to model the geometric distortions of the images. A normal-angle lens Nikon camera and wide-angle lens GoPro camera were calibrated using the proposed method, as well as the conventional bundle adjustment with self-calibration method (for comparison). Results showed that the mapping error was reduced from an average of 14.9 mm to 1.2 mm (i.e. a 92% improvement) and 66.6 mm to 1.5 mm (i.e. a 98% improvement) using the proposed method for the Nikon and GoPro cameras, respectively. In contrast, the conventional approach achieved an average 3D error of 0.9 mm (i.e. 94% improvement) and 3.3 mm (i.e. 95% improvement) for the Nikon and GoPro cameras, respectively. Thus, the proposed method performs well irrespective of the lens/sensor used: it yields results that are comparable to the conventional approach for normal-angle lens cameras, and it has the additional benefit of improving calibration results for wide-angle lens cameras.
* ISPRS TC I Mid-term Symposium "Innovative Sensing - From Sensors to Methods and Applications", 10-12 October 2018. Karlsruhe, Germany