 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Rendering as a Way to Program Cable-Driven Soft Robots
Apr 11, 2024


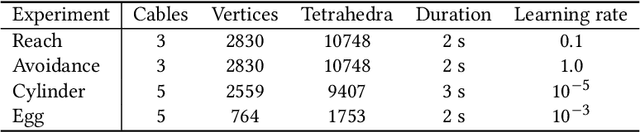
Soft robots have gained increased popularity in recent years due to their adaptability and compliance. In this paper, we use a digital twin model of cable-driven soft robots to learn control parameters in simulation. In doing so, we take advantage of differentiable rendering as a way to instruct robots to complete tasks such as point reach, gripping an object, and obstacle avoidance. This approach simplifies the mathematical description of such complicated tasks and removes the need for landmark points and their tracking. Our experiments demonstrate the applicability of our method.
Semi-supervised, Topology-Aware Segmentation of Tubular Structures from Live Imaging 3D Microscopy
May 20, 2021


Motivated by a challenging tubular network segmentation task, this paper tackles two commonly encountered problems in biomedical imaging: Topological consistency of the segmentation, and limited annotations. We propose a topological score which measures both topological and geometric consistency between the predicted and ground truth segmentations, applied for model selection and validation. We apply our topological score in three scenarios: i. a U-net ii. a U-net pretrained on an autoencoder, and iii. a semisupervised U-net architecture, which offers a straightforward approach to jointly training the network both as an autoencoder and a segmentation algorithm. This allows us to utilize un-annotated data for training a representation that generalizes across test data variability, in spite of our annotated training data having very limited variation. Our contributions are validated on a challenging segmentation task, locating tubular structures in the fetal pancreas from noisy live imaging confocal microscopy.
Is segmentation uncertainty useful?
Mar 30, 2021
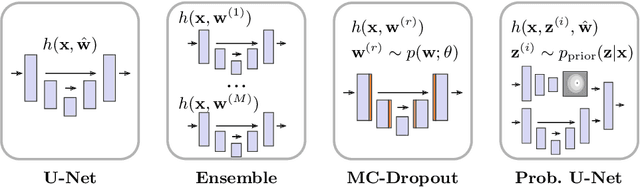
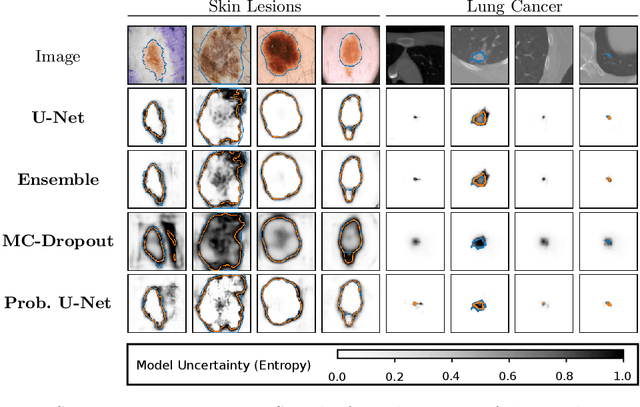
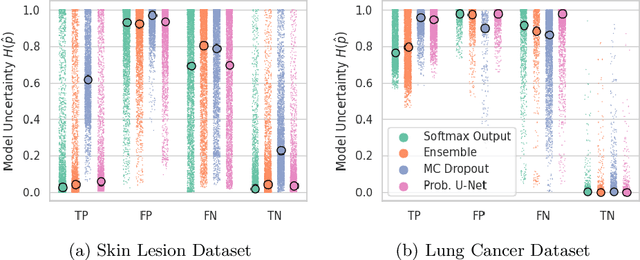
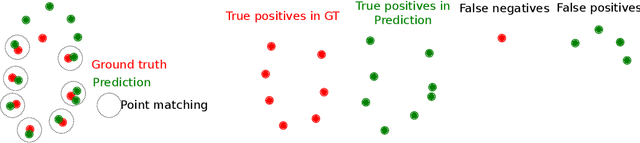
Probabilistic image segmentation encodes varying prediction confidence and inherent ambiguity in the segmentation problem. While different probabilistic segmentation models are designed to capture different aspects of segmentation uncertainty and ambiguity, these modelling differences are rarely discussed in the context of applications of uncertainty. We consider two common use cases of segmentation uncertainty, namely assessment of segmentation quality and active learning. We consider four established strategies for probabilistic segmentation, discuss their modelling capabilities, and investigate their performance in these two tasks. We find that for all models and both tasks, returned uncertainty correlates positively with segmentation error, but does not prove to be useful for active learning.