 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving satellite imagery segmentation using multiple Sentinel-2 revisits
Sep 25, 2024In recent years, analysis of remote sensing data has benefited immensely from borrowing techniques from the broader field of computer vision, such as the use of shared models pre-trained on large and diverse datasets. However, satellite imagery has unique features that are not accounted for in traditional computer vision, such as the existence of multiple revisits of the same location. Here, we explore the best way to use revisits in the framework of fine-tuning pre-trained remote sensing models. We focus on an applied research question of relevance to climate change mitigation -- power substation segmentation -- that is representative of applied uses of pre-trained models more generally. Through extensive tests of different multi-temporal input schemes across diverse model architectures, we find that fusing representations from multiple revisits in the model latent space is superior to other methods of using revisits, including as a form of data augmentation. We also find that a SWIN Transformer-based architecture performs better than U-nets and ViT-based models. We verify the generality of our results on a separate building density estimation task.
ADAADepth: Adapting Data Augmentation and Attention for Self-Supervised Monocular Depth Estimation
Mar 01, 2021
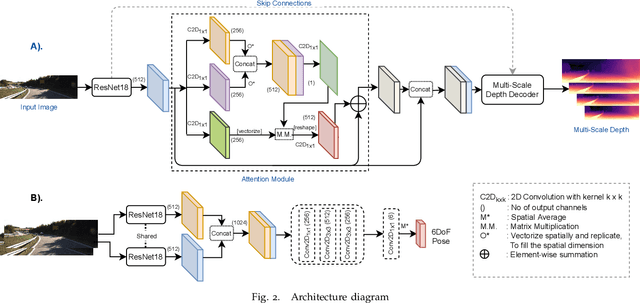

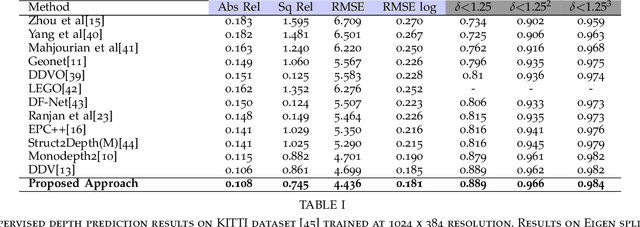
Self-supervised learning of depth has been a highly studied topic of research as it alleviates the requirement of having ground truth annotations for predicting depth. Depth is learnt as an intermediate solution to the task of view synthesis, utilising warped photometric consistency. Although it gives good results when trained using stereo data, the predicted depth is still sensitive to noise, illumination changes and specular reflections. Also, occlusion can be tackled better by learning depth from a single camera. We propose ADAA, utilising depth augmentation as depth supervision for learning accurate and robust depth. We propose a relational self-attention module that learns rich contextual features and further enhances depth results. We also optimize the auto-masking strategy across all losses by enforcing L1 regularisation over mask. Our novel progressive training strategy first learns depth at a lower resolution and then progresses to the original resolution with slight training. We utilise a ResNet18 encoder, learning features for prediction of both depth and pose. We evaluate our predicted depth on the standard KITTI driving dataset and achieve state-of-the-art results for monocular depth estimation whilst having significantly lower number of trainable parameters in our deep learning framework. We also evaluate our model on Make3D dataset showing better generalization than other methods.