 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoding BACnet Packets: A Large Language Model Approach for Packet Interpretation
Jul 22, 2024The Industrial Control System (ICS) environment encompasses a wide range of intricate communication protocols, posing substantial challenges for Security Operations Center (SOC) analysts tasked with monitoring, interpreting, and addressing network activities and security incidents. Conventional monitoring tools and techniques often struggle to provide a clear understanding of the nature and intent of ICS-specific communications. To enhance comprehension, we propose a software solution powered by a Large Language Model (LLM). This solution currently focused on BACnet protocol, processes a packet file data and extracts context by using a mapping database, and contemporary context retrieval methods for Retrieval Augmented Generation (RAG). The processed packet information, combined with the extracted context, serves as input to the LLM, which generates a concise packet file summary for the user. The software delivers a clear, coherent, and easily understandable summary of network activities, enabling SOC analysts to better assess the current state of the control system.
Intention-Net: Integrating Planning and Deep Learning for Goal-Directed Autonomous Navigation
Oct 17, 2017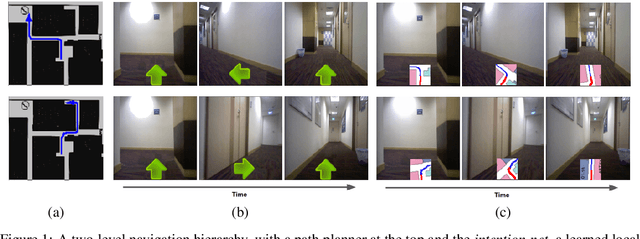
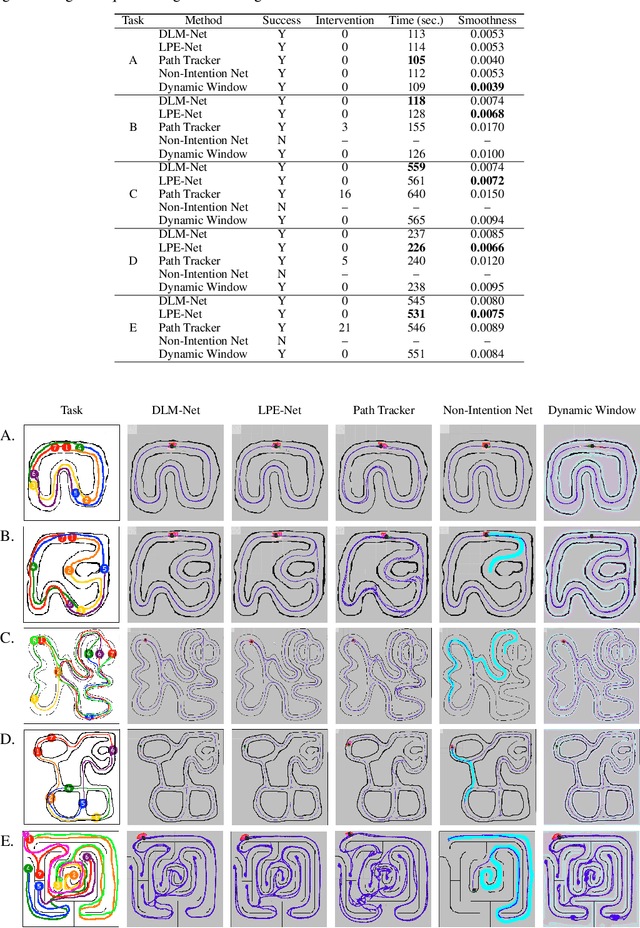

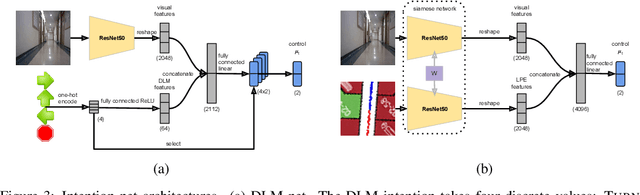
How can a delivery robot navigate reliably to a destination in a new office building, with minimal prior information? To tackle this challenge, this paper introduces a two-level hierarchical approach, which integrates model-free deep learning and model-based path planning. At the low level, a neural-network motion controller, called the intention-net, is trained end-to-end to provide robust local navigation. The intention-net maps images from a single monocular camera and "intentions" directly to robot controls. At the high level, a path planner uses a crude map, e.g., a 2-D floor plan, to compute a path from the robot's current location to the goal. The planned path provides intentions to the intention-net. Preliminary experiments suggest that the learned motion controller is robust against perceptual uncertainty and by integrating with a path planner, it generalizes effectively to new environments and goals.