 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Mamba Operator for Partial Differential Equations
May 25, 2025Neural operators have emerged as powerful data-driven frameworks for solving Partial Differential Equations (PDEs), offering significant speedups over numerical methods. However, existing neural operators struggle with scalability in high-dimensional spaces, incur high computational costs, and face challenges in capturing continuous and long-range dependencies in PDE dynamics. To address these limitations, we introduce the Latent Mamba Operator (LaMO), which integrates the efficiency of state-space models (SSMs) in latent space with the expressive power of kernel integral formulations in neural operators. We also establish a theoretical connection between state-space models (SSMs) and the kernel integral of neural operators. Extensive experiments across diverse PDE benchmarks on regular grids, structured meshes, and point clouds covering solid and fluid physics datasets, LaMOs achieve consistent state-of-the-art (SOTA) performance, with a 32.3\% improvement over existing baselines in solution operator approximation, highlighting its efficacy in modeling complex PDE solutions.
Battery State of Health Estimation Using LLM Framework
Jan 30, 2025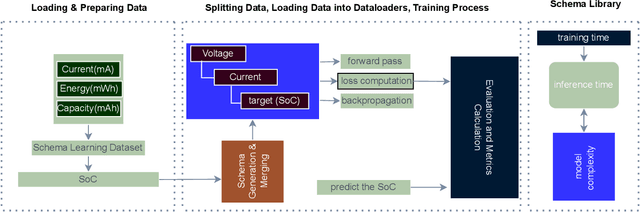
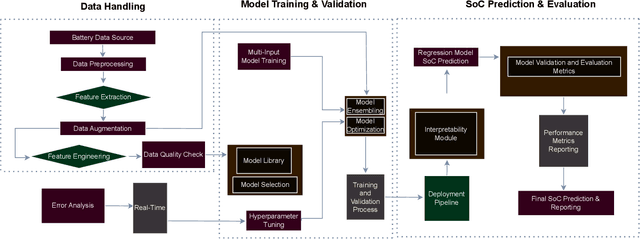
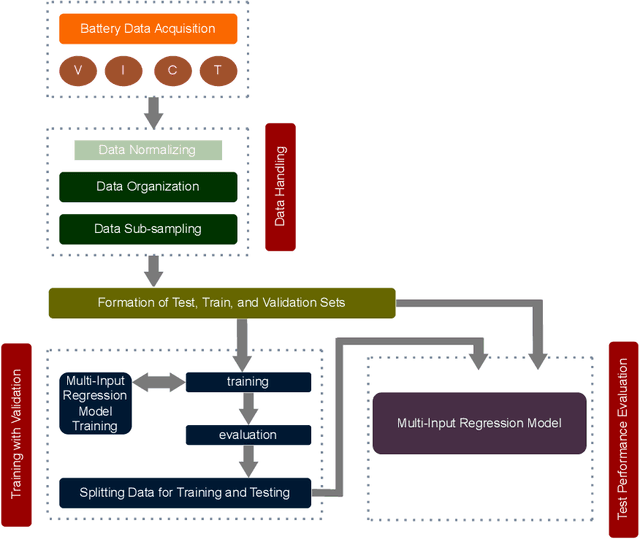
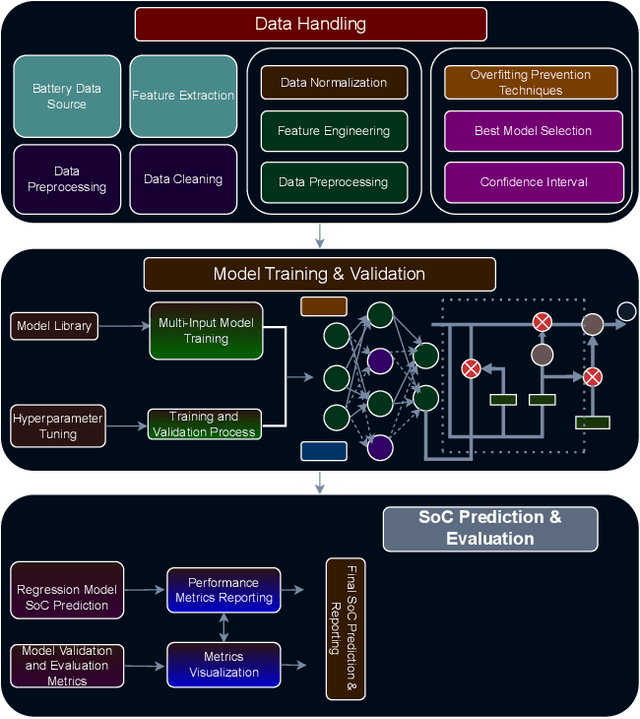
Battery health monitoring is critical for the efficient and reliable operation of electric vehicles (EVs). This study introduces a transformer-based framework for estimating the State of Health (SoH) and predicting the Remaining Useful Life (RUL) of lithium titanate (LTO) battery cells by utilizing both cycle-based and instantaneous discharge data. Testing on eight LTO cells under various cycling conditions over 500 cycles, we demonstrate the impact of charge durations on energy storage trends and apply Differential Voltage Analysis (DVA) to monitor capacity changes (dQ/dV) across voltage ranges. Our LLM model achieves superior performance, with a Mean Absolute Error (MAE) as low as 0.87\% and varied latency metrics that support efficient processing, demonstrating its strong potential for real-time integration into EVs. The framework effectively identifies early signs of degradation through anomaly detection in high-resolution data, facilitating predictive maintenance to prevent sudden battery failures and enhance energy efficiency.
CoNOAir: A Neural Operator for Forecasting Carbon Monoxide Evolution in Cities
Jan 13, 2025



Carbon Monoxide (CO) is a dominant pollutant in urban areas due to the energy generation from fossil fuels for industry, automobile, and domestic requirements. Forecasting the evolution of CO in real-time can enable the deployment of effective early warning systems and intervention strategies. However, the computational cost associated with the physics and chemistry-based simulation makes it prohibitive to implement such a model at the city and country scale. To address this challenge, here, we present a machine learning model based on neural operator, namely, Complex Neural Operator for Air Quality (CoNOAir), that can effectively forecast CO concentrations. We demonstrate this by developing a country-level model for short-term (hourly) and long-term (72-hour) forecasts of CO concentrations. Our model outperforms state-of-the-art models such as Fourier neural operators (FNO) and provides reliable predictions for both short and long-term forecasts. We further analyse the capability of the model to capture extreme events and generate forecasts in urban cities in India. Interestingly, we observe that the model predicts the next hour CO concentrations with R2 values greater than 0.95 for all the cities considered. The deployment of such a model can greatly assist the governing bodies to provide early warning, plan intervention strategies, and develop effective strategies by considering several what-if scenarios. Altogether, the present approach could provide a fillip to real-time predictions of CO pollution in urban cities.
Multimodal LLM for Intelligent Transportation Systems
Dec 16, 2024



In the evolving landscape of transportation systems, integrating Large Language Models (LLMs) offers a promising frontier for advancing intelligent decision-making across various applications. This paper introduces a novel 3-dimensional framework that encapsulates the intersection of applications, machine learning methodologies, and hardware devices, particularly emphasizing the role of LLMs. Instead of using multiple machine learning algorithms, our framework uses a single, data-centric LLM architecture that can analyze time series, images, and videos. We explore how LLMs can enhance data interpretation and decision-making in transportation. We apply this LLM framework to different sensor datasets, including time-series data and visual data from sources like Oxford Radar RobotCar, D-Behavior (D-Set), nuScenes by Motional, and Comma2k19. The goal is to streamline data processing workflows, reduce the complexity of deploying multiple models, and make intelligent transportation systems more efficient and accurate. The study was conducted using state-of-the-art hardware, leveraging the computational power of AMD RTX 3060 GPUs and Intel i9-12900 processors. The experimental results demonstrate that our framework achieves an average accuracy of 91.33\% across these datasets, with the highest accuracy observed in time-series data (92.7\%), showcasing the model's proficiency in handling sequential information essential for tasks such as motion planning and predictive maintenance. Through our exploration, we demonstrate the versatility and efficacy of LLMs in handling multimodal data within the transportation sector, ultimately providing insights into their application in real-world scenarios. Our findings align with the broader conference themes, highlighting the transformative potential of LLMs in advancing transportation technologies.
CoNO: Complex Neural Operator for Continous Dynamical Physical Systems
Jun 01, 2024Neural operators extend data-driven models to map between infinite-dimensional functional spaces. While these operators perform effectively in either the time or frequency domain, their performance may be limited when applied to non-stationary spatial or temporal signals whose frequency characteristics change with time. Here, we introduce Complex Neural Operator (CoNO) that parameterizes the integral kernel using Fractional Fourier Transform (FrFT), better representing non-stationary signals in a complex-valued domain. Theoretically, we prove the universal approximation capability of CoNO. We perform an extensive empirical evaluation of CoNO on seven challenging partial differential equations (PDEs), including regular grids, structured meshes, and point clouds. Empirically, CoNO consistently attains state-of-the-art performance, showcasing an average relative gain of 10.9%. Further, CoNO exhibits superior performance, outperforming all other models in additional tasks such as zero-shot super-resolution and robustness to noise. CoNO also exhibits the ability to learn from small amounts of data -- giving the same performance as the next best model with just 60% of the training data. Altogether, CoNO presents a robust and superior model for modeling continuous dynamical systems, providing a fillip to scientific machine learning.
CoNO: Complex Neural Operator for Continuous Dynamical Systems
Oct 04, 2023



Neural operators extend data-driven models to map between infinite-dimensional functional spaces. These models have successfully solved continuous dynamical systems represented by differential equations, viz weather forecasting, fluid flow, or solid mechanics. However, the existing operators still rely on real space, thereby losing rich representations potentially captured in the complex space by functional transforms. In this paper, we introduce a Complex Neural Operator (CoNO), that parameterizes the integral kernel in the complex fractional Fourier domain. Additionally, the model employing a complex-valued neural network along with aliasing-free activation functions preserves the complex values and complex algebraic properties, thereby enabling improved representation, robustness to noise, and generalization. We show that the model effectively captures the underlying partial differential equation with a single complex fractional Fourier transform. We perform an extensive empirical evaluation of CoNO on several datasets and additional tasks such as zero-shot super-resolution, evaluation of out-of-distribution data, data efficiency, and robustness to noise. CoNO exhibits comparable or superior performance to all the state-of-the-art models in these tasks. Altogether, CoNO presents a robust and superior model for modeling continuous dynamical systems, providing a fillip to scientific machine learning.
CoDBench: A Critical Evaluation of Data-driven Models for Continuous Dynamical Systems
Oct 02, 2023Continuous dynamical systems, characterized by differential equations, are ubiquitously used to model several important problems: plasma dynamics, flow through porous media, weather forecasting, and epidemic dynamics. Recently, a wide range of data-driven models has been used successfully to model these systems. However, in contrast to established fields like computer vision, limited studies are available analyzing the strengths and potential applications of different classes of these models that could steer decision-making in scientific machine learning. Here, we introduce CodBench, an exhaustive benchmarking suite comprising 11 state-of-the-art data-driven models for solving differential equations. Specifically, we comprehensively evaluate 4 distinct categories of models, viz., feed forward neural networks, deep operator regression models, frequency-based neural operators, and transformer architectures against 8 widely applicable benchmark datasets encompassing challenges from fluid and solid mechanics. We conduct extensive experiments, assessing the operators' capabilities in learning, zero-shot super-resolution, data efficiency, robustness to noise, and computational efficiency. Interestingly, our findings highlight that current operators struggle with the newer mechanics datasets, motivating the need for more robust neural operators. All the datasets and codes will be shared in an easy-to-use fashion for the scientific community. We hope this resource will be an impetus for accelerated progress and exploration in modeling dynamical systems.