 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFriction and Road Condition Estimation by Combining Cause- and Effect-Based Methods using Bayesian Networks
Jul 16, 2024Knowledge about the maximum tire-road friction potential is an important factor to ensure the driving stability and traffic safety of the vehicle. Many authors proposed systems that either measure friction related parameters or estimate the friction coefficient directly via a mathematical model. However these systems can be negatively impacted by environmental factors or require a sufficient level of excitation in the form of tire slip, which is often too low under practical conditions. Therefore, this work investigates, if a more robust estimation can be achieved by fusing the information of multiple systems using a Bayesian network, which models the statistical relationship between the sensors and the maximum friction coefficient. First, the Bayesian network is evaluated over its entire domain to compare the inference process to all possible road conditions. After that, the algorithm is applied to data from a test vehicle to demonstrate the performance under real conditions.
Autoencoder-based Representation Learning from Heterogeneous Multivariate Time Series Data of Mechatronic Systems
Apr 08, 2021
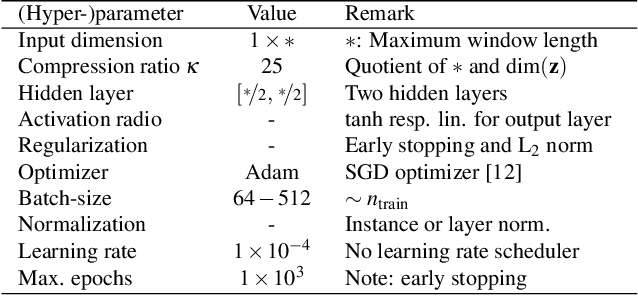


Sensor and control data of modern mechatronic systems are often available as heterogeneous time series with different sampling rates and value ranges. Suitable classification and regression methods from the field of supervised machine learning already exist for predictive tasks, for example in the context of condition monitoring, but their performance scales strongly with the number of labeled training data. Their provision is often associated with high effort in the form of person-hours or additional sensors. In this paper, we present a method for unsupervised feature extraction using autoencoder networks that specifically addresses the heterogeneous nature of the database and reduces the amount of labeled training data required compared to existing methods. Three public datasets of mechatronic systems from different application domains are used to validate the results.
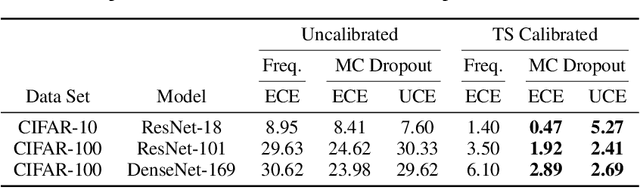
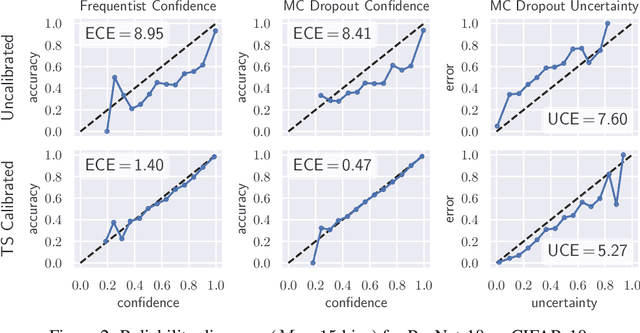
Calibration of Model Uncertainty for Dropout Variational Inference
Jun 20, 2020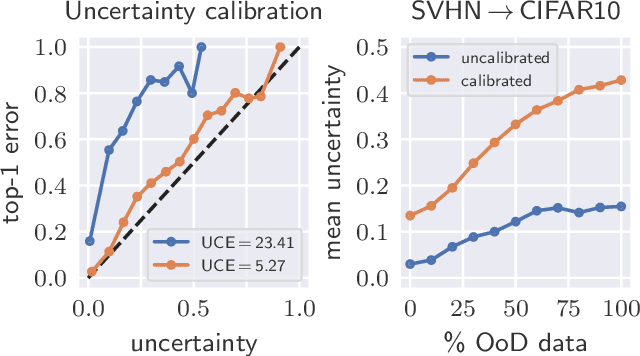
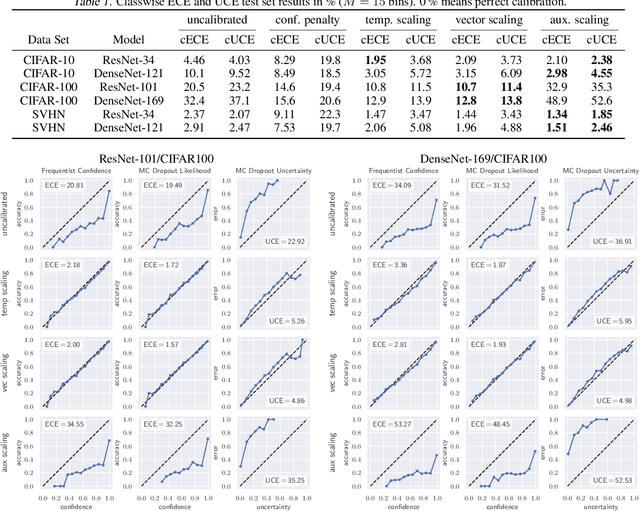
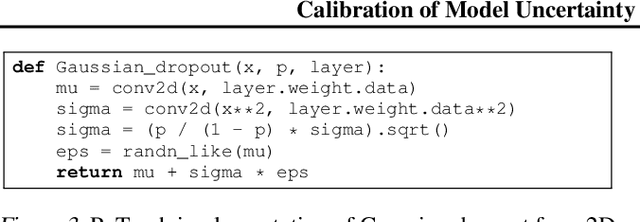
The model uncertainty obtained by variational Bayesian inference with Monte Carlo dropout is prone to miscalibration. In this paper, different logit scaling methods are extended to dropout variational inference to recalibrate model uncertainty. Expected uncertainty calibration error (UCE) is presented as a metric to measure miscalibration. The effectiveness of recalibration is evaluated on CIFAR-10/100 and SVHN for recent CNN architectures. Experimental results show that logit scaling considerably reduce miscalibration by means of UCE. Well-calibrated uncertainty enables reliable rejection of uncertain predictions and robust detection of out-of-distribution data.
Well-calibrated Model Uncertainty with Temperature Scaling for Dropout Variational Inference
Oct 01, 2019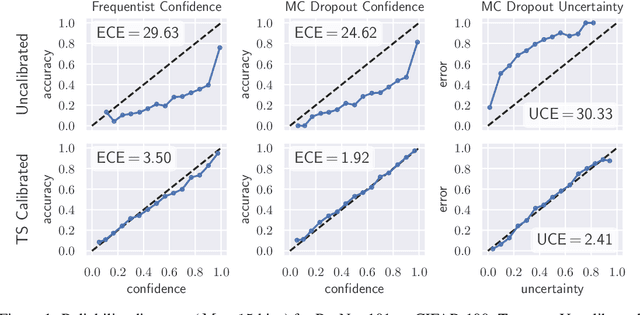
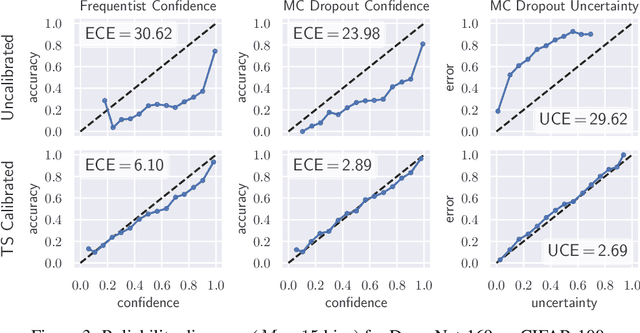
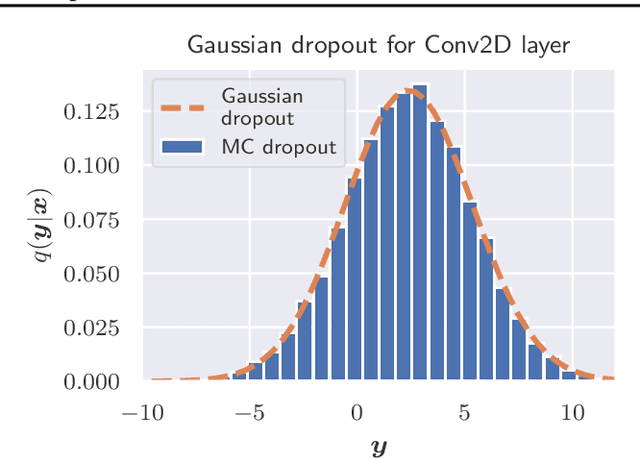
In this paper, well-calibrated model uncertainty is obtained by using temperature scaling together with Monte Carlo dropout as approximation to Bayesian inference. The proposed approach can easily be derived from frequentist temperature scaling and yields well-calibrated model uncertainty as well as softmax likelihood.