 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring World Belief States in Dynamic Real-World Environments
Apr 13, 2026We investigate estimating a human's world belief state using a robot's observations in a dynamic, 3D, and partially observable environment. The methods are grounded in mental model theory, which posits that human decision making, contextual reasoning, situation awareness, and behavior planning draw from an internal simulation or world belief state. When in teams, the mental model also includes a team model of each teammate's beliefs and capabilities, enabling fluent teamwork without the need for constant and explicit communication. In this work we replicate a core component of the team model by inferring a teammate's belief state, or level one situation awareness, as a human-robot team navigates a household environment. We evaluate our methods in a realistic simulation, extend to a real-world robot platform, and demonstrate a downstream application of the belief state through an active assistance semantic reasoning task.
Biased Error Attribution in Multi-Agent Human-AI Systems Under Delayed Feedback
Mar 24, 2026Human decision-making is strongly influenced by cognitive biases, particularly under conditions of uncertainty and risk. While prior work has examined bias in single-step decisions with immediate outcomes and in human interaction with a single autonomous agent, comparatively little attention has been paid to decision-making under delayed outcomes involving multiple AI agents, where decisions at each step affect subsequent states. In this work, we study how delayed outcomes shape decision-making and responsibility attribution in a multi-agent human-AI task. Using a controlled game-based experiment, we analyze how participants adjust their behavior following positive and negative outcomes. We observe asymmetric responses to gains and losses, with stronger corrective adjustments after negative outcomes. Importantly, participants often fail to correctly identify the actions that caused failure and misattribute responsibility across AI agents, leading to systematic revisions of decisions that are weakly related to the underlying causes of poor performance. We refer to this phenomenon as a form of attribution bias, manifested as biased error attribution under delayed feedback. Our findings highlight how cognitive biases can be amplified in human-AI systems with delayed outcomes and multiple autonomous agents, underscoring the need for decision-support systems that better support causal understanding and learning over time.
Adaptive Obstacle-Aware Task Assignment and Planning for Heterogeneous Robot Teaming
Oct 15, 2025Multi-Agent Task Assignment and Planning (MATP) has attracted growing attention but remains challenging in terms of scalability, spatial reasoning, and adaptability in obstacle-rich environments. To address these challenges, we propose OATH: Adaptive Obstacle-Aware Task Assignment and Planning for Heterogeneous Robot Teaming, which advances MATP by introducing a novel obstacle-aware strategy for task assignment. First, we develop an adaptive Halton sequence map, the first known application of Halton sampling with obstacle-aware adaptation in MATP, which adjusts sampling density based on obstacle distribution. Second, we propose a cluster-auction-selection framework that integrates obstacle-aware clustering with weighted auctions and intra-cluster task selection. These mechanisms jointly enable effective coordination among heterogeneous robots while maintaining scalability and near-optimal allocation performance. In addition, our framework leverages an LLM to interpret human instructions and directly guide the planner in real time. We validate OATH in NVIDIA Isaac Sim, showing substantial improvements in task assignment quality, scalability, adaptability to dynamic changes, and overall execution performance compared to state-of-the-art MATP baselines. A project website is available at https://llm-oath.github.io/.
LTL-D*: Incrementally Optimal Replanning for Feasible and Infeasible Tasks in Linear Temporal Logic Specifications
Apr 01, 2024



This paper presents an incremental replanning algorithm, dubbed LTL-D*, for temporal-logic-based task planning in a dynamically changing environment. Unexpected changes in the environment may lead to failures in satisfying a task specification in the form of a Linear Temporal Logic (LTL). In this study, the considered failures are categorized into two classes: (i) the desired LTL specification can be satisfied via replanning, and (ii) the desired LTL specification is infeasible to meet strictly and can only be satisfied in a "relaxed" fashion. To address these failures, the proposed algorithm finds an optimal replanning solution that minimally violates desired task specifications. In particular, our approach leverages the D* Lite algorithm and employs a distance metric within the synthesized automaton to quantify the degree of the task violation and then replan incrementally. This ensures plan optimality and reduces planning time, especially when frequent replanning is required. Our approach is implemented in a robot navigation simulation to demonstrate a significant improvement in the computational efficiency for replanning by two orders of magnitude.
Inferring Belief States in Partially-Observable Human-Robot Teams
Mar 18, 2024



We investigate the real-time estimation of human situation awareness using observations from a robot teammate with limited visibility. In human factors and human-autonomy teaming, it is recognized that individuals navigate their environments using an internal mental simulation, or mental model. The mental model informs cognitive processes including situation awareness, contextual reasoning, and task planning. In teaming domains, the mental model includes a team model of each teammate's beliefs and capabilities, enabling fluent teamwork without the need for explicit communication. However, little work has applied team models to human-robot teaming. We compare the performance of two current methods at estimating user situation awareness over varying visibility conditions. Our results indicate that the methods are largely resilient to low-visibility conditions in our domain, however opportunities exist to improve their overall performance.
Converging Measures and an Emergent Model: A Meta-Analysis of Human-Automation Trust Questionnaires
Mar 24, 2023


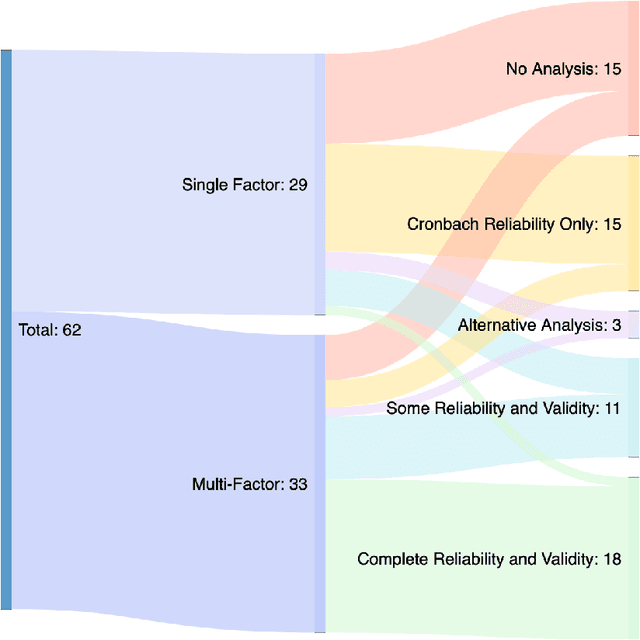
A significant challenge to measuring human-automation trust is the amount of construct proliferation, models, and questionnaires with highly variable validation. However, all agree that trust is a crucial element of technological acceptance, continued usage, fluency, and teamwork. Herein, we synthesize a consensus model for trust in human-automation interaction by performing a meta-analysis of validated and reliable trust survey instruments. To accomplish this objective, this work identifies the most frequently cited and best-validated human-automation and human-robot trust questionnaires, as well as the most well-established factors, which form the dimensions and antecedents of such trust. To reduce both confusion and construct proliferation, we provide a detailed mapping of terminology between questionnaires. Furthermore, we perform a meta-analysis of the regression models that emerged from those experiments which used multi-factorial survey instruments. Based on this meta-analysis, we demonstrate a convergent experimentally validated model of human-automation trust. This convergent model establishes an integrated framework for future research. It identifies the current boundaries of trust measurement and where further investigation is necessary. We close by discussing choosing and designing an appropriate trust survey instrument. By comparing, mapping, and analyzing well-constructed trust survey instruments, a consensus structure of trust in human-automation interaction is identified. Doing so discloses a more complete basis for measuring trust emerges that is widely applicable. It integrates the academic idea of trust with the colloquial, common-sense one. Given the increasingly recognized importance of trust, especially in human-automation interaction, this work leaves us better positioned to understand and measure it.
Committing to Interdependence: Implications from Game Theory for Human-Robot Trust
Nov 12, 2021



Human-robot interaction and game theory have developed distinct theories of trust for over three decades in relative isolation from one another. Human-robot interaction has focused on the underlying dimensions, layers, correlates, and antecedents of trust models, while game theory has concentrated on the psychology and strategies behind singular trust decisions. Both fields have grappled to understand over-trust and trust calibration, as well as how to measure trust expectations, risk, and vulnerability. This paper presents initial steps in closing the gap between these fields. Using insights and experimental findings from interdependence theory and social psychology, this work starts by analyzing a large game theory competition data set to demonstrate that the strongest predictors for a wide variety of human-human trust interactions are the interdependence-derived variables for commitment and trust that we have developed. It then presents a second study with human subject results for more realistic trust scenarios, involving both human-human and human-machine trust. In both the competition data and our experimental data, we demonstrate that the interdependence metrics better capture social `overtrust' than either rational or normative psychological reasoning, as proposed by game theory. This work further explores how interdependence theory--with its focus on commitment, coercion, and cooperation--addresses many of the proposed underlying constructs and antecedents within human-robot trust, shedding new light on key similarities and differences that arise when robots replace humans in trust interactions.