 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisuoTactile 6D Pose Estimation of an In-Hand Object using Vision and Tactile Sensor Data
Jan 04, 2026Knowledge of the 6D pose of an object can benefit in-hand object manipulation. In-hand 6D object pose estimation is challenging because of heavy occlusion produced by the robot's grippers, which can have an adverse effect on methods that rely on vision data only. Many robots are equipped with tactile sensors at their fingertips that could be used to complement vision data. In this paper, we present a method that uses both tactile and vision data to estimate the pose of an object grasped in a robot's hand. To address challenges like lack of standard representation for tactile data and sensor fusion, we propose the use of point clouds to represent object surfaces in contact with the tactile sensor and present a network architecture based on pixel-wise dense fusion. We also extend NVIDIA's Deep Learning Dataset Synthesizer to produce synthetic photo-realistic vision data and corresponding tactile point clouds. Results suggest that using tactile data in addition to vision data improves the 6D pose estimate, and our network generalizes successfully from synthetic training to real physical robots.
* Accepted for publication in IEEE Robotics and Automation Letters (RA-L), January 2022. Presented at ICRA 2022. This is the author's version of the manuscript
ResPilot: Teleoperated Finger Gaiting via Gaussian Process Residual Learning
Sep 13, 2024Dexterous robot hand teleoperation allows for long-range transfer of human manipulation expertise, and could simultaneously provide a way for humans to teach these skills to robots. However, current methods struggle to reproduce the functional workspace of the human hand, often limiting them to simple grasping tasks. We present a novel method for finger-gaited manipulation with multi-fingered robot hands. Our method provides the operator enhanced flexibility in making contacts by expanding the reachable workspace of the robot hand through residual Gaussian Process learning. We also assist the operator in maintaining stable contacts with the object by allowing them to constrain fingertips of the hand to move in concert. Extensive quantitative evaluations show that our method significantly increases the reachable workspace of the robot hand and enables the completion of novel dexterous finger gaiting tasks. Project website: http://respilot-hri.github.io
Hierarchical Deep Learning for Intention Estimation of Teleoperation Manipulation in Assembly Tasks
Mar 28, 2024



In human-robot collaboration, shared control presents an opportunity to teleoperate robotic manipulation to improve the efficiency of manufacturing and assembly processes. Robots are expected to assist in executing the user's intentions. To this end, robust and prompt intention estimation is needed, relying on behavioral observations. The framework presents an intention estimation technique at hierarchical levels i.e., low-level actions and high-level tasks, by incorporating multi-scale hierarchical information in neural networks. Technically, we employ hierarchical dependency loss to boost overall accuracy. Furthermore, we propose a multi-window method that assigns proper hierarchical prediction windows of input data. An analysis of the predictive power with various inputs demonstrates the predominance of the deep hierarchical model in the sense of prediction accuracy and early intention identification. We implement the algorithm on a virtual reality (VR) setup to teleoperate robotic hands in a simulation with various assembly tasks to show the effectiveness of online estimation.
Deep Tactile Experience: Estimating Tactile Sensor Output from Depth Sensor Data
Oct 17, 2021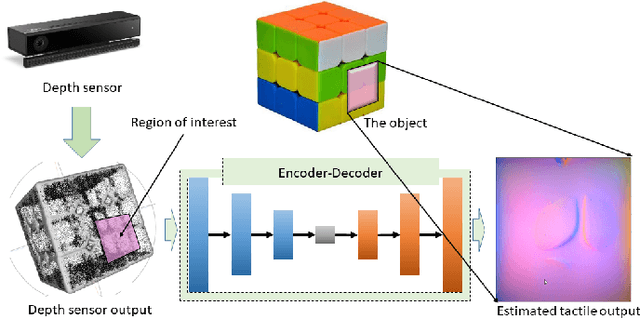
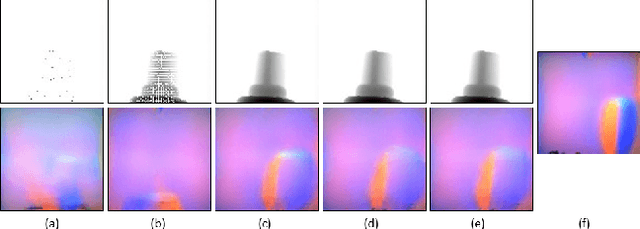
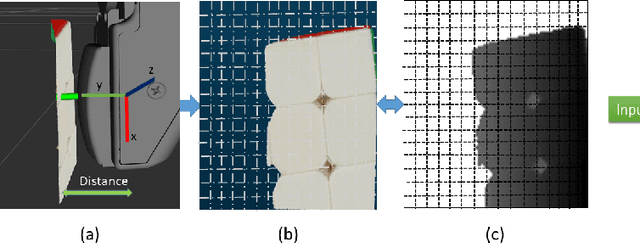
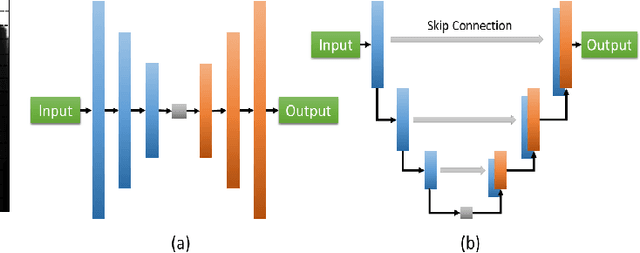
Tactile sensing is inherently contact based. To use tactile data, robots need to make contact with the surface of an object. This is inefficient in applications where an agent needs to make a decision between multiple alternatives that depend the physical properties of the contact location. We propose a method to get tactile data in a non-invasive manner. The proposed method estimates the output of a tactile sensor from the depth data of the surface of the object based on past experiences. An experience dataset is built by allowing the robot to interact with various objects, collecting tactile data and the corresponding object surface depth data. We use the experience dataset to train a neural network to estimate the tactile output from depth data alone. We use GelSight tactile sensors, an image-based sensor, to generate images that capture detailed surface features at the contact location. We train a network with a dataset containing 578 tactile-image to depthmap correspondences. Given a depth-map of the surface of an object, the network outputs an estimate of the response of the tactile sensor, should it make a contact with the object. We evaluate the method with structural similarity index matrix (SSIM), a similarity metric between two images commonly used in image processing community. We present experimental results that show the proposed method outperforms a baseline that uses random images with statistical significance getting an SSIM score of 0.84 +/- 0.0056 and 0.80 +/- 0.0036, respectively.