 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Point-Based Graphics
Jul 16, 2019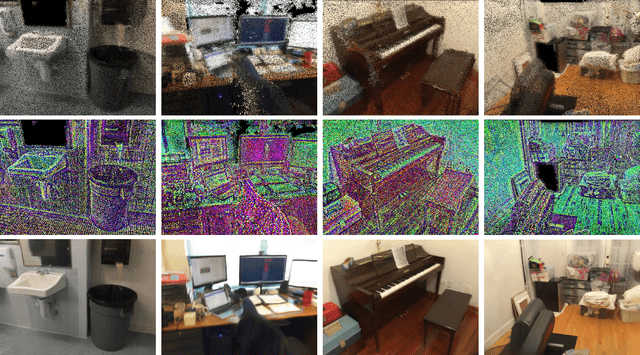
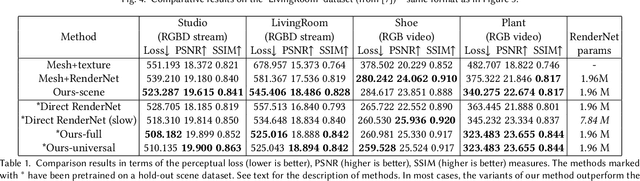


We present a new point-based approach for modeling complex scenes. The approach uses a raw point cloud as the geometric representation of a scene, and augments each point with a learnable neural descriptor that encodes local geometry and appearance. A deep rendering network is learned in parallel with the descriptors, so that new views of the scene can be obtained by passing the rasterizations of a point cloud from new viewpoints through this network. The input rasterizations use the learned descriptors as point pseudo-colors. We show that the proposed approach can be used for modeling complex scenes and obtaining their photorealistic views, while avoiding explicit surface estimation and meshing. In particular, compelling results are obtained for scene scanned using hand-held commodity RGB-D sensors as well as standard RGB cameras even in the presence of objects that are challenging for standard mesh-based modeling.
Textured Neural Avatars
May 21, 2019
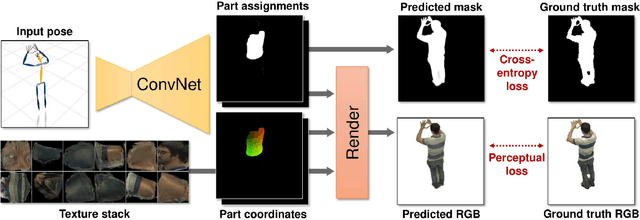
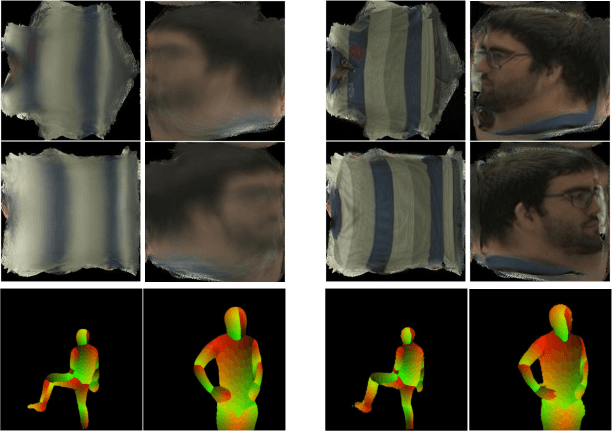
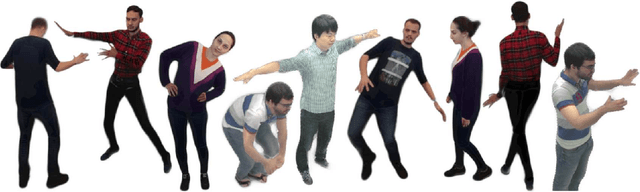
We present a system for learning full-body neural avatars, i.e. deep networks that produce full-body renderings of a person for varying body pose and camera position. Our system takes the middle path between the classical graphics pipeline and the recent deep learning approaches that generate images of humans using image-to-image translation. In particular, our system estimates an explicit two-dimensional texture map of the model surface. At the same time, it abstains from explicit shape modeling in 3D. Instead, at test time, the system uses a fully-convolutional network to directly map the configuration of body feature points w.r.t. the camera to the 2D texture coordinates of individual pixels in the image frame. We show that such a system is capable of learning to generate realistic renderings while being trained on videos annotated with 3D poses and foreground masks. We also demonstrate that maintaining an explicit texture representation helps our system to achieve better generalization compared to systems that use direct image-to-image translation.