 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHallucinative Topological Memory for Zero-Shot Visual Planning
Feb 27, 2020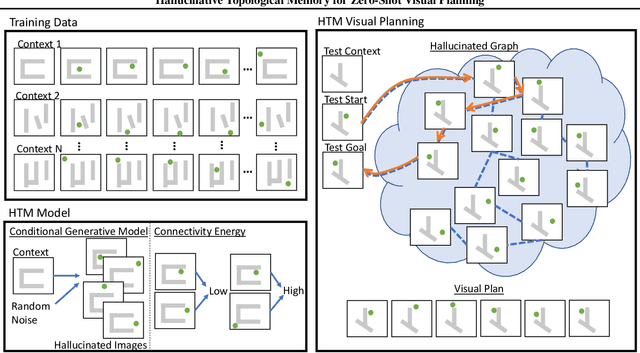
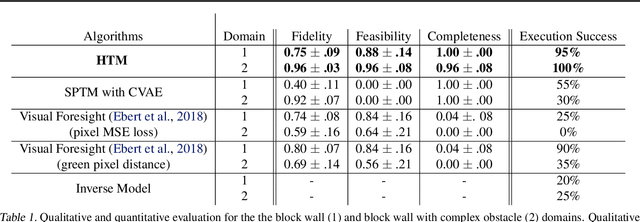
In visual planning (VP), an agent learns to plan goal-directed behavior from observations of a dynamical system obtained offline, e.g., images obtained from self-supervised robot interaction. Most previous works on VP approached the problem by planning in a learned latent space, resulting in low-quality visual plans, and difficult training algorithms. Here, instead, we propose a simple VP method that plans directly in image space and displays competitive performance. We build on the semi-parametric topological memory (SPTM) method: image samples are treated as nodes in a graph, the graph connectivity is learned from image sequence data, and planning can be performed using conventional graph search methods. We propose two modifications on SPTM. First, we train an energy-based graph connectivity function using contrastive predictive coding that admits stable training. Second, to allow zero-shot planning in new domains, we learn a conditional VAE model that generates images given a context of the domain, and use these hallucinated samples for building the connectivity graph and planning. We show that this simple approach significantly outperform the state-of-the-art VP methods, in terms of both plan interpretability and success rate when using the plan to guide a trajectory-following controller. Interestingly, our method can pick up non-trivial visual properties of objects, such as their geometry, and account for it in the plans.
Learning Robotic Manipulation through Visual Planning and Acting
May 11, 2019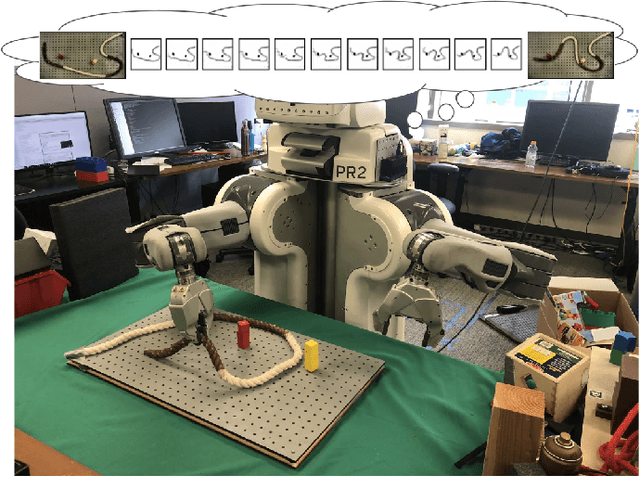
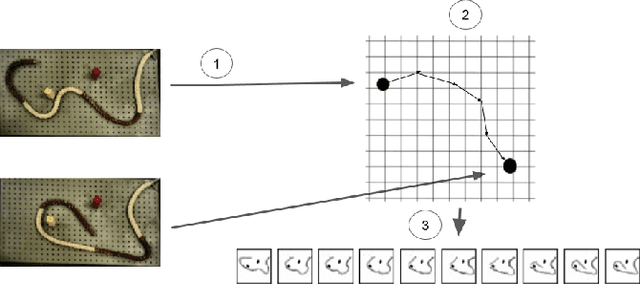
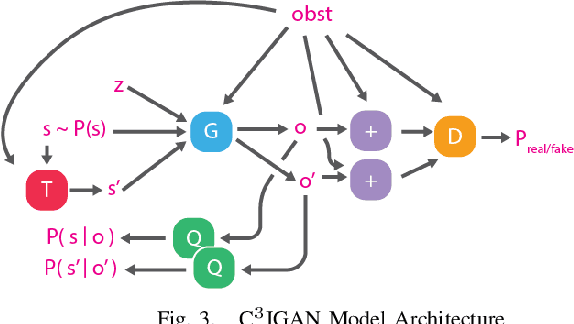
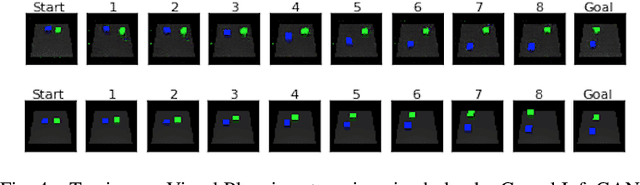
Planning for robotic manipulation requires reasoning about the changes a robot can affect on objects. When such interactions can be modelled analytically, as in domains with rigid objects, efficient planning algorithms exist. However, in both domestic and industrial domains, the objects of interest can be soft, or deformable, and hard to model analytically. For such cases, we posit that a data-driven modelling approach is more suitable. In recent years, progress in deep generative models has produced methods that learn to `imagine' plausible images from data. Building on the recent Causal InfoGAN generative model, in this work we learn to imagine goal-directed object manipulation directly from raw image data of self-supervised interaction of the robot with the object. After learning, given a goal observation of the system, our model can generate an imagined plan -- a sequence of images that transition the object into the desired goal. To execute the plan, we use it as a reference trajectory to track with a visual servoing controller, which we also learn from the data as an inverse dynamics model. In a simulated manipulation task, we show that separating the problem into visual planning and visual tracking control is more sample efficient and more interpretable than alternative data-driven approaches. We further demonstrate our approach on learning to imagine and execute in 3 environments, the final of which is deformable rope manipulation on a PR2 robot.