 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHallucinative Topological Memory for Zero-Shot Visual Planning
Paper and Code
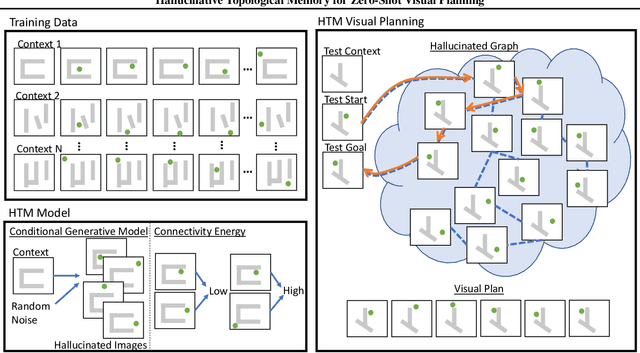
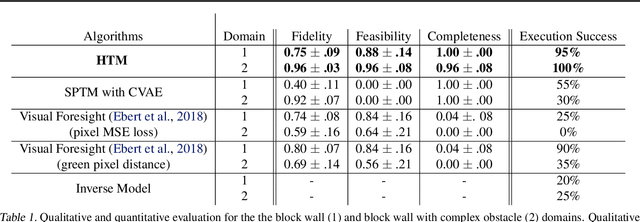
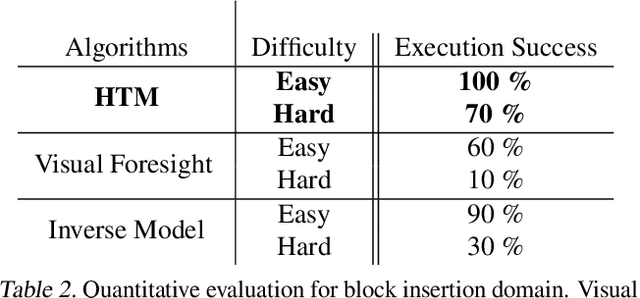
In visual planning (VP), an agent learns to plan goal-directed behavior from observations of a dynamical system obtained offline, e.g., images obtained from self-supervised robot interaction. Most previous works on VP approached the problem by planning in a learned latent space, resulting in low-quality visual plans, and difficult training algorithms. Here, instead, we propose a simple VP method that plans directly in image space and displays competitive performance. We build on the semi-parametric topological memory (SPTM) method: image samples are treated as nodes in a graph, the graph connectivity is learned from image sequence data, and planning can be performed using conventional graph search methods. We propose two modifications on SPTM. First, we train an energy-based graph connectivity function using contrastive predictive coding that admits stable training. Second, to allow zero-shot planning in new domains, we learn a conditional VAE model that generates images given a context of the domain, and use these hallucinated samples for building the connectivity graph and planning. We show that this simple approach significantly outperform the state-of-the-art VP methods, in terms of both plan interpretability and success rate when using the plan to guide a trajectory-following controller. Interestingly, our method can pick up non-trivial visual properties of objects, such as their geometry, and account for it in the plans.