 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHoGS: Homophily-Oriented Graph Synthesis for Local Differentially Private GNN Training
Feb 09, 2026Graph neural networks (GNNs) have demonstrated remarkable performance in various graph-based machine learning tasks by effectively modeling high-order interactions between nodes. However, training GNNs without protection may leak sensitive personal information in graph data, including links and node features. Local differential privacy (LDP) is an advanced technique for protecting data privacy in decentralized networks. Unfortunately, existing local differentially private GNNs either only preserve link privacy or suffer significant utility loss in the process of preserving link and node feature privacy. In this paper, we propose an effective LDP framework, called HoGS, which trains GNNs with link and feature protection by generating a synthetic graph. Concretely, HoGS first collects the link and feature information of the graph under LDP, and then utilizes the phenomenon of homophily in graph data to reconstruct the graph structure and node features separately, thereby effectively mitigating the negative impact of LDP on the downstream GNN training. We theoretically analyze the privacy guarantee of HoGS and conduct experiments using the generated synthetic graph as input to various state-of-the-art GNN architectures. Experimental results on three real-world datasets show that HoGS significantly outperforms baseline methods in the accuracy of training GNNs.
An Efficient Imbalance-Aware Federated Learning Approach for Wearable Healthcare with Autoregressive Ratio Observation
Oct 30, 2023

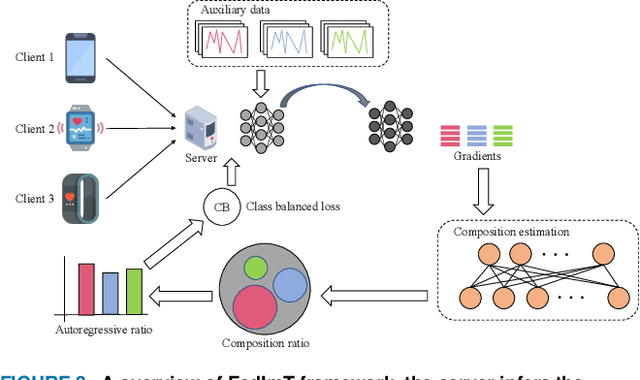
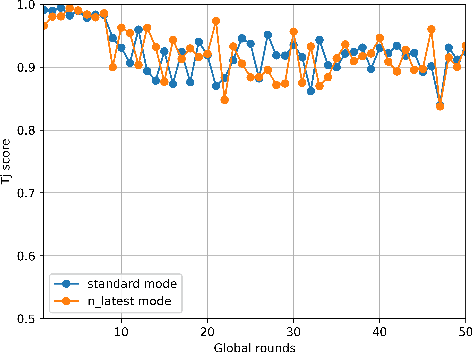
Widely available healthcare services are now getting popular because of advancements in wearable sensing techniques and mobile edge computing. People's health information is collected by edge devices such as smartphones and wearable bands for further analysis on servers, then send back suggestions and alerts for abnormal conditions. The recent emergence of federated learning allows users to train private data on local devices while updating models collaboratively. However, the heterogeneous distribution of the health condition data may lead to significant risks to model performance due to class imbalance. Meanwhile, as FL training is powered by sharing gradients only with the server, training data is almost inaccessible. The conventional solutions to class imbalance do not work for federated learning. In this work, we propose a new federated learning framework FedImT, dedicated to addressing the challenges of class imbalance in federated learning scenarios. FedImT contains an online scheme that can estimate the data composition during each round of aggregation, then introduces a self-attenuating iterative equivalent to track variations of multiple estimations and promptly tweak the balance of the loss computing for minority classes. Experiments demonstrate the effectiveness of FedImT in solving the imbalance problem without extra energy consumption and avoiding privacy risks.
UAV Base Station Trajectory Optimization Based on Reinforcement Learning in Post-disaster Search and Rescue Operations
Feb 17, 2022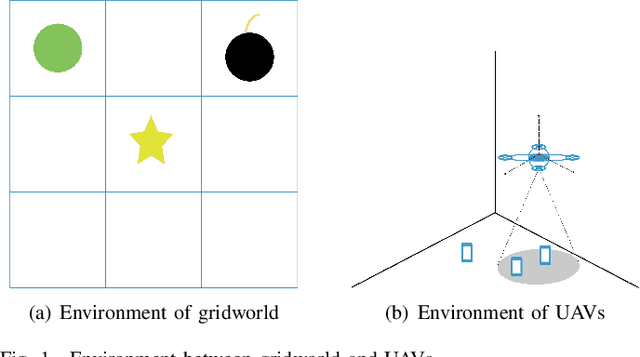
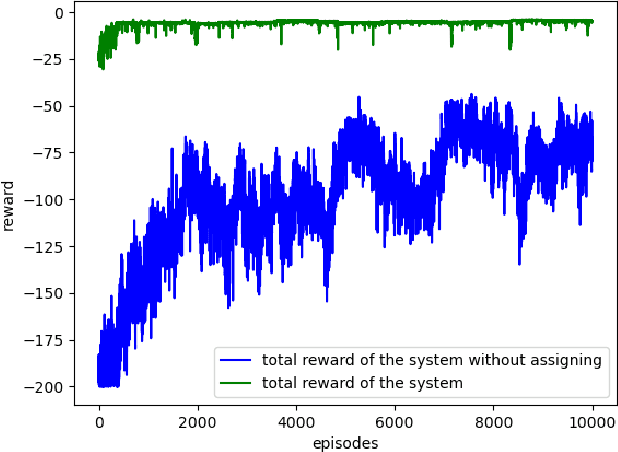
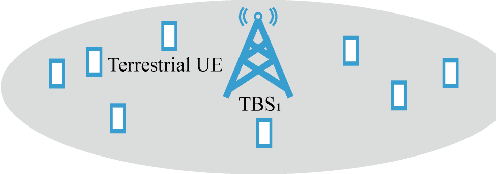
Because of disaster, terrestrial base stations (TBS) would be partly crashed. Some user equipments (UE) would be unserved. Deploying unmanned aerial vehicles (UAV) as aerial base stations is a method to cover UEs quickly. But existing methods solely refer to the coverage of UAVs. In those scenarios, they focus on the deployment of UAVs in the post-disaster area where all TBSs do not work any longer. There is limited research about the combination of available TBSs and UAVs. We propose the method to deploy UAVs cooperating with available TBSs as aerial base stations. And improve the coverage by reinforcement learning. Besides, in the experiments, we cluster UEs with balanced iterative reducing and clustering using hierarchies (BIRCH) at first. Finally, achieve base stations' better coverage to UEs through Q-learning.
Deep Reinforcement Learning Based Multi-Access Edge Computing Schedule for Internet of Vehicle
Feb 15, 2022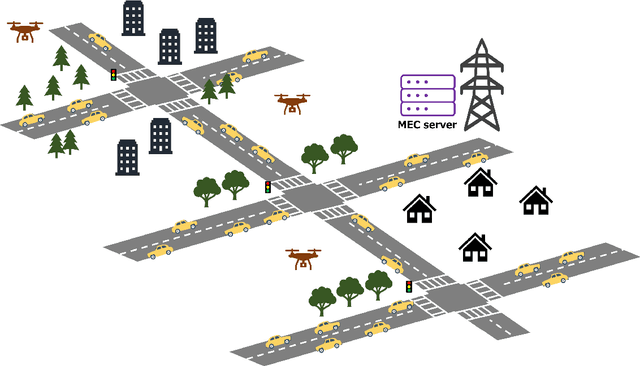
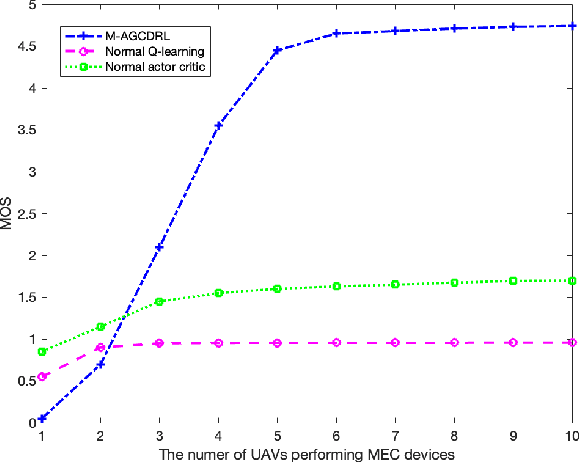
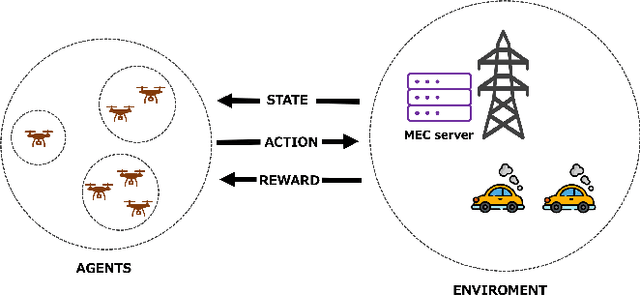
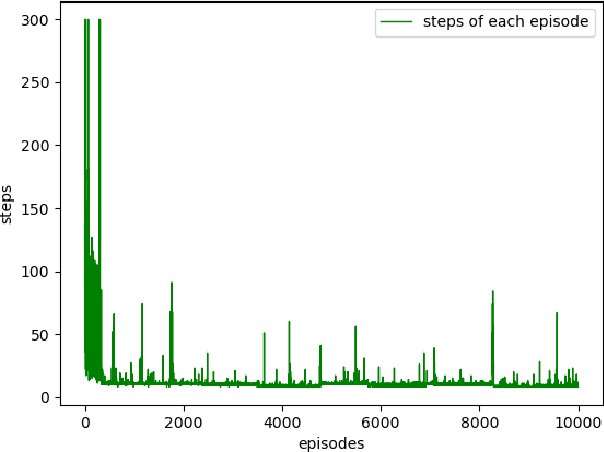
As intelligent transportation systems been implemented broadly and unmanned arial vehicles (UAVs) can assist terrestrial base stations acting as multi-access edge computing (MEC) to provide a better wireless network communication for Internet of Vehicles (IoVs), we propose a UAVs-assisted approach to help provide a better wireless network service retaining the maximum Quality of Experience(QoE) of the IoVs on the lane. In the paper, we present a Multi-Agent Graph Convolutional Deep Reinforcement Learning (M-AGCDRL) algorithm which combines local observations of each agent with a low-resolution global map as input to learn a policy for each agent. The agents can share their information with others in graph attention networks, resulting in an effective joint policy. Simulation results show that the M-AGCDRL method enables a better QoE of IoTs and achieves good performance.
Clairvoyance: Intelligent Route Planning for Electric Buses Based on Urban Big Data
Dec 09, 2021Nowadays many cities around the world have introduced electric buses to optimize urban traffic and reduce local carbon emissions. In order to cut carbon emissions and maximize the utility of electric buses, it is important to choose suitable routes for them. Traditionally, route selection is on the basis of dedicated surveys, which are costly in time and labor. In this paper, we mainly focus attention on planning electric bus routes intelligently, depending on the unique needs of each region throughout the city. We propose Clairvoyance, a route planning system that leverages a deep neural network and a multilayer perceptron to predict the future people's trips and the future transportation carbon emission in the whole city, respectively. Given the future information of people's trips and transportation carbon emission, we utilize a greedy mechanism to recommend bus routes for electric buses that will depart in an ideal state. Furthermore, representative features of the two neural networks are extracted from the heterogeneous urban datasets. We evaluate our approach through extensive experiments on real-world data sources in Zhuhai, China. The results show that our designed neural network-based algorithms are consistently superior to the typical baselines. Additionally, the recommended routes for electric buses are helpful in reducing the peak value of carbon emissions and making full use of electric buses in the city.