 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgressiveAvatars: Progressive Animatable 3D Gaussian Avatars
Mar 17, 2026In practical real-time XR and telepresence applications, network and computing resources fluctuate frequently. Therefore, a progressive 3D representation is needed. To this end, we propose ProgressiveAvatars, a progressive avatar representation built on a hierarchy of 3D Gaussians grown by adaptive implicit subdivision on a template mesh. 3D Gaussians are defined in face-local coordinates to remain animatable under varying expressions and head motion across multiple detail levels. The hierarchy expands when screen-space signals indicate a lack of detail, allocating resources to important areas. Leveraging importance ranking, ProgressiveAvatars supports incremental loading and rendering, adding new Gaussians as they arrive while preserving previous content, thus achieving smooth quality improvements across varying bandwidths. ProgressiveAvatars enables progressive delivery and progressive rendering under fluctuating network bandwidth and varying compute and memory resources.
PLANING: A Loosely Coupled Triangle-Gaussian Framework for Streaming 3D Reconstruction
Jan 29, 2026Streaming reconstruction from monocular image sequences remains challenging, as existing methods typically favor either high-quality rendering or accurate geometry, but rarely both. We present PLANING, an efficient on-the-fly reconstruction framework built on a hybrid representation that loosely couples explicit geometric primitives with neural Gaussians, enabling geometry and appearance to be modeled in a decoupled manner. This decoupling supports an online initialization and optimization strategy that separates geometry and appearance updates, yielding stable streaming reconstruction with substantially reduced structural redundancy. PLANING improves dense mesh Chamfer-L2 by 18.52% over PGSR, surpasses ARTDECO by 1.31 dB PSNR, and reconstructs ScanNetV2 scenes in under 100 seconds, over 5x faster than 2D Gaussian Splatting, while matching the quality of offline per-scene optimization. Beyond reconstruction quality, the structural clarity and computational efficiency of \modelname~make it well suited for a broad range of downstream applications, such as enabling large-scale scene modeling and simulation-ready environments for embodied AI. Project page: https://city-super.github.io/PLANING/ .
Deformable NeRF using Recursively Subdivided Tetrahedra
Oct 06, 2024



While neural radiance fields (NeRF) have shown promise in novel view synthesis, their implicit representation limits explicit control over object manipulation. Existing research has proposed the integration of explicit geometric proxies to enable deformation. However, these methods face two primary challenges: firstly, the time-consuming and computationally demanding tetrahedralization process; and secondly, handling complex or thin structures often leads to either excessive, storage-intensive tetrahedral meshes or poor-quality ones that impair deformation capabilities. To address these challenges, we propose DeformRF, a method that seamlessly integrates the manipulability of tetrahedral meshes with the high-quality rendering capabilities of feature grid representations. To avoid ill-shaped tetrahedra and tetrahedralization for each object, we propose a two-stage training strategy. Starting with an almost-regular tetrahedral grid, our model initially retains key tetrahedra surrounding the object and subsequently refines object details using finer-granularity mesh in the second stage. We also present the concept of recursively subdivided tetrahedra to create higher-resolution meshes implicitly. This enables multi-resolution encoding while only necessitating the storage of the coarse tetrahedral mesh generated in the first training stage. We conduct a comprehensive evaluation of our DeformRF on both synthetic and real-captured datasets. Both quantitative and qualitative results demonstrate the effectiveness of our method for novel view synthesis and deformation tasks. Project page: https://ustc3dv.github.io/DeformRF/
Oblique-MERF: Revisiting and Improving MERF for Oblique Photography
Apr 15, 2024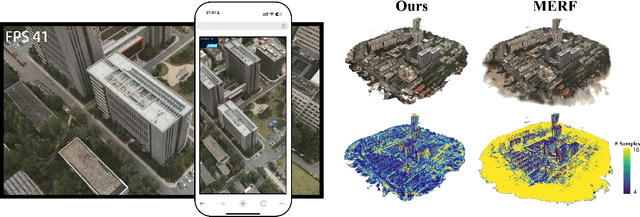
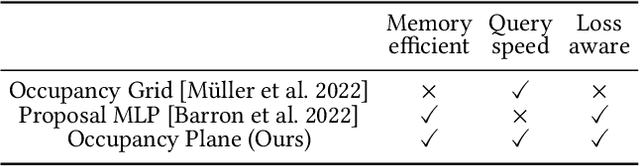
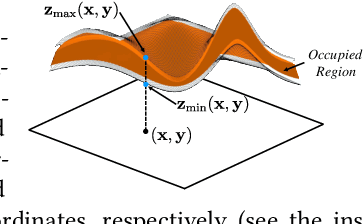
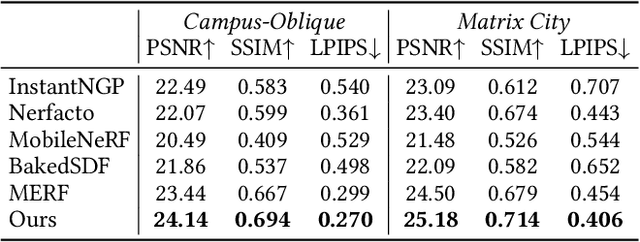
Neural implicit fields have established a new paradigm for scene representation, with subsequent work achieving high-quality real-time rendering. However, reconstructing 3D scenes from oblique aerial photography presents unique challenges, such as varying spatial scale distributions and a constrained range of tilt angles, often resulting in high memory consumption and reduced rendering quality at extrapolated viewpoints. In this paper, we enhance MERF to accommodate these data characteristics by introducing an innovative adaptive occupancy plane optimized during the volume rendering process and a smoothness regularization term for view-dependent color to address these issues. Our approach, termed Oblique-MERF, surpasses state-of-the-art real-time methods by approximately 0.7 dB, reduces VRAM usage by about 40%, and achieves higher rendering frame rates with more realistic rendering outcomes across most viewpoints.
City-on-Web: Real-time Neural Rendering of Large-scale Scenes on the Web
Dec 27, 2023



NeRF has significantly advanced 3D scene reconstruction, capturing intricate details across various environments. Existing methods have successfully leveraged radiance field baking to facilitate real-time rendering of small scenes. However, when applied to large-scale scenes, these techniques encounter significant challenges, struggling to provide a seamless real-time experience due to limited resources in computation, memory, and bandwidth. In this paper, we propose City-on-Web, which represents the whole scene by partitioning it into manageable blocks, each with its own Level-of-Detail, ensuring high fidelity, efficient memory management and fast rendering. Meanwhile, we carefully design the training and inference process such that the final rendering result on web is consistent with training. Thanks to our novel representation and carefully designed training/inference process, we are the first to achieve real-time rendering of large-scale scenes in resource-constrained environments. Extensive experimental results demonstrate that our method facilitates real-time rendering of large-scale scenes on a web platform, achieving 32FPS at 1080P resolution with an RTX 3060 GPU, while simultaneously achieving a quality that closely rivals that of state-of-the-art methods. Project page: https://ustc3dv.github.io/City-on-Web/