 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWardropNet: Traffic Flow Predictions via Equilibrium-Augmented Learning
Oct 09, 2024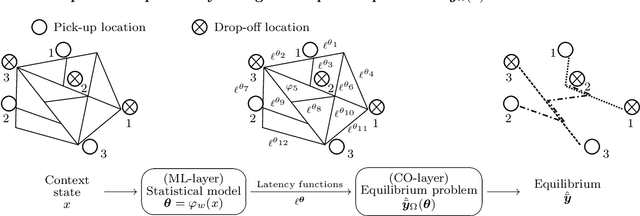
When optimizing transportation systems, anticipating traffic flows is a central element. Yet, computing such traffic equilibria remains computationally expensive. Against this background, we introduce a novel combinatorial optimization augmented neural network architecture that allows for fast and accurate traffic flow predictions. We propose WardropNet, a neural network that combines classical layers with a subsequent equilibrium layer: the first ones inform the latter by predicting the parameterization of the equilibrium problem's latency functions. Using supervised learning we minimize the difference between the actual traffic flow and the predicted output. We show how to leverage a Bregman divergence fitting the geometry of the equilibria, which allows for end-to-end learning. WardropNet outperforms pure learning-based approaches in predicting traffic equilibria for realistic and stylized traffic scenarios. On realistic scenarios, WardropNet improves on average for time-invariant predictions by up to 72% and for time-variant predictions by up to 23% over pure learning-based approaches.
Combinatorial Optimization enriched Machine Learning to solve the Dynamic Vehicle Routing Problem with Time Windows
Apr 03, 2023With the rise of e-commerce and increasing customer requirements, logistics service providers face a new complexity in their daily planning, mainly due to efficiently handling same day deliveries. Existing multi-stage stochastic optimization approaches that allow to solve the underlying dynamic vehicle routing problem are either computationally too expensive for an application in online settings, or -- in the case of reinforcement learning -- struggle to perform well on high-dimensional combinatorial problems. To mitigate these drawbacks, we propose a novel machine learning pipeline that incorporates a combinatorial optimization layer. We apply this general pipeline to a dynamic vehicle routing problem with dispatching waves, which was recently promoted in the EURO Meets NeurIPS Vehicle Routing Competition at NeurIPS 2022. Our methodology ranked first in this competition, outperforming all other approaches in solving the proposed dynamic vehicle routing problem. With this work, we provide a comprehensive numerical study that further highlights the efficacy and benefits of the proposed pipeline beyond the results achieved in the competition, e.g., by showcasing the robustness of the encoded policy against unseen instances and scenarios.
Learning-based Online Optimization for Autonomous Mobility-on-Demand Fleet Control
Feb 08, 2023Autonomous mobility-on-demand systems are a viable alternative to mitigate many transportation-related externalities in cities, such as rising vehicle volumes in urban areas and transportation-related pollution. However, the success of these systems heavily depends on efficient and effective fleet control strategies. In this context, we study online control algorithms for autonomous mobility-on-demand systems and develop a novel hybrid combinatorial optimization enriched machine learning pipeline which learns online dispatching and rebalancing policies from optimal full-information solutions. We test our hybrid pipeline on large-scale real-world scenarios with different vehicle fleet sizes and various request densities. We show that our approach outperforms state-of-the-art greedy, and model-predictive control approaches with respect to various KPIs, e.g., by up to 17.1% and on average by 6.3% in terms of realized profit.