 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChannel-wise Noise Scheduled Diffusion for Inverse Rendering in Indoor Scenes
Mar 13, 2025We propose a diffusion-based inverse rendering framework that decomposes a single RGB image into geometry, material, and lighting. Inverse rendering is inherently ill-posed, making it difficult to predict a single accurate solution. To address this challenge, recent generative model-based methods aim to present a range of possible solutions. However, finding a single accurate solution and generating diverse solutions can be conflicting. In this paper, we propose a channel-wise noise scheduling approach that allows a single diffusion model architecture to achieve two conflicting objectives. The resulting two diffusion models, trained with different channel-wise noise schedules, can predict a single highly accurate solution and present multiple possible solutions. The experimental results demonstrate the superiority of our two models in terms of both diversity and accuracy, which translates to enhanced performance in downstream applications such as object insertion and material editing.
MAIR++: Improving Multi-view Attention Inverse Rendering with Implicit Lighting Representation
Aug 13, 2024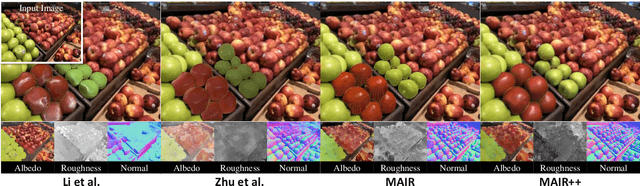
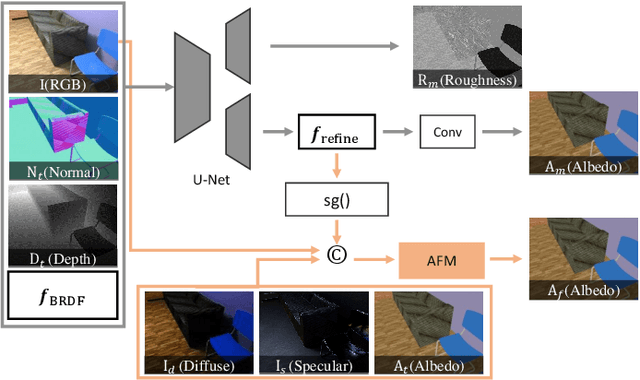
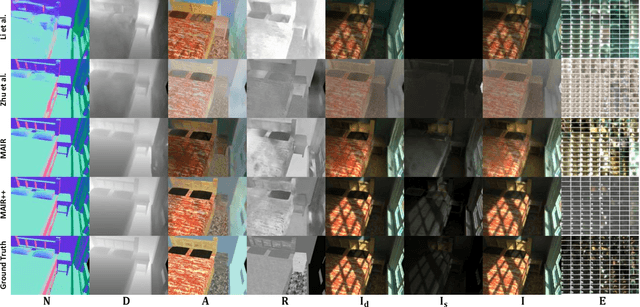
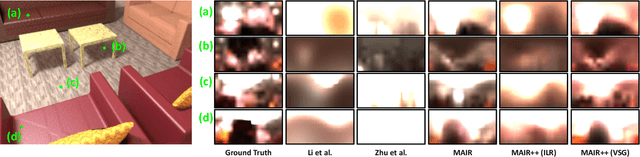
In this paper, we propose a scene-level inverse rendering framework that uses multi-view images to decompose the scene into geometry, SVBRDF, and 3D spatially-varying lighting. While multi-view images have been widely used for object-level inverse rendering, scene-level inverse rendering has primarily been studied using single-view images due to the lack of a dataset containing high dynamic range multi-view images with ground-truth geometry, material, and spatially-varying lighting. To improve the quality of scene-level inverse rendering, a novel framework called Multi-view Attention Inverse Rendering (MAIR) was recently introduced. MAIR performs scene-level multi-view inverse rendering by expanding the OpenRooms dataset, designing efficient pipelines to handle multi-view images, and splitting spatially-varying lighting. Although MAIR showed impressive results, its lighting representation is fixed to spherical Gaussians, which limits its ability to render images realistically. Consequently, MAIR cannot be directly used in applications such as material editing. Moreover, its multi-view aggregation networks have difficulties extracting rich features because they only focus on the mean and variance between multi-view features. In this paper, we propose its extended version, called MAIR++. MAIR++ addresses the aforementioned limitations by introducing an implicit lighting representation that accurately captures the lighting conditions of an image while facilitating realistic rendering. Furthermore, we design a directional attention-based multi-view aggregation network to infer more intricate relationships between views. Experimental results show that MAIR++ not only achieves better performance than MAIR and single-view-based methods, but also displays robust performance on unseen real-world scenes.
MAIR: Multi-view Attention Inverse Rendering with 3D Spatially-Varying Lighting Estimation
Mar 27, 2023



We propose a scene-level inverse rendering framework that uses multi-view images to decompose the scene into geometry, a SVBRDF, and 3D spatially-varying lighting. Because multi-view images provide a variety of information about the scene, multi-view images in object-level inverse rendering have been taken for granted. However, owing to the absence of multi-view HDR synthetic dataset, scene-level inverse rendering has mainly been studied using single-view image. We were able to successfully perform scene-level inverse rendering using multi-view images by expanding OpenRooms dataset and designing efficient pipelines to handle multi-view images, and splitting spatially-varying lighting. Our experiments show that the proposed method not only achieves better performance than single-view-based methods, but also achieves robust performance on unseen real-world scene. Also, our sophisticated 3D spatially-varying lighting volume allows for photorealistic object insertion in any 3D location.
ExtremeNeRF: Few-shot Neural Radiance Fields Under Unconstrained Illumination
Mar 22, 2023



In this paper, we propose a new challenge that synthesizes a novel view in a more practical environment, where the number of input multi-view images is limited and illumination variations are significant. Despite recent success, neural radiance fields (NeRF) require a massive amount of input multi-view images taken under constrained illuminations. To address the problem, we suggest ExtremeNeRF, which utilizes occlusion-aware multiview albedo consistency, supported by geometric alignment and depth consistency. We extract intrinsic image components that should be illumination-invariant across different views, enabling direct appearance comparison between the input and novel view under unconstrained illumination. We provide extensive experimental results for an evaluation of the task, using the newly built NeRF Extreme benchmark, which is the first in-the-wild novel view synthesis benchmark taken under multiple viewing directions and varying illuminations. The project page is at https://seokyeong94.github.io/ExtremeNeRF/