 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsometric force pillow: using air pressure to quantify involuntary finger flexion in the presence of hypertonia
Aug 21, 2020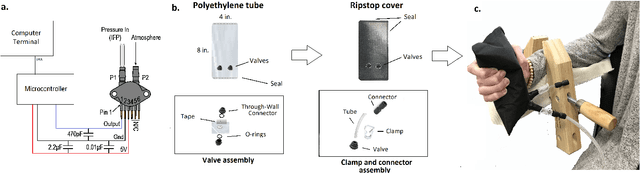
Survivors of central nervous system injury commonly present with spastic hypertonia. The affected muscles are hyperexcitable and can display involuntary static muscle tone and an exaggerated stretch reflex. These symptoms affect posture and disrupt activities of daily living. Symptoms are typically measured using subjective manual tests such as the Modified Ashworth Scale; however, more quantitative measures are necessary to evaluate potential treatments. The hands are one of the most common targets for intervention, but few investigators attempt to quantify symptoms of spastic hypertonia affecting the fingers. We present the isometric force pillow (IFP) to quantify involuntary grip force. This lightweight, computerized tool provides a holistic measure of finger flexion force and can be used in various orientations for clinical testing and to measure the impact of assistive devices.
Task-Based Hybrid Shared Control for Training Through Forceful Interaction
Nov 18, 2019
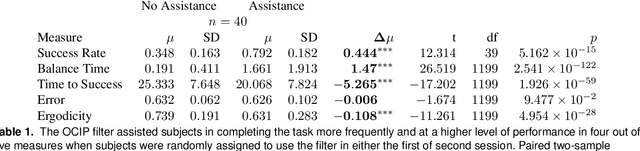
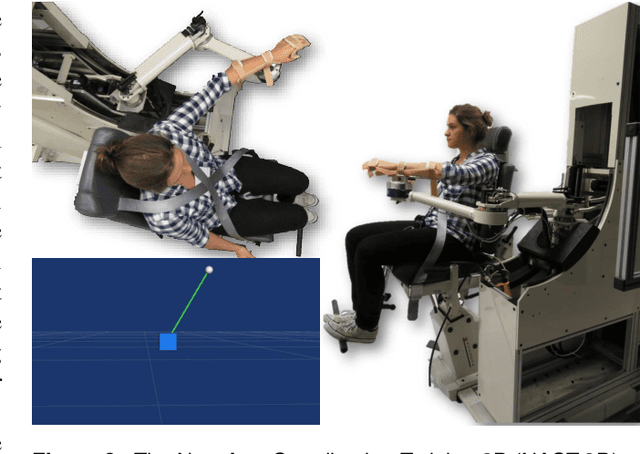
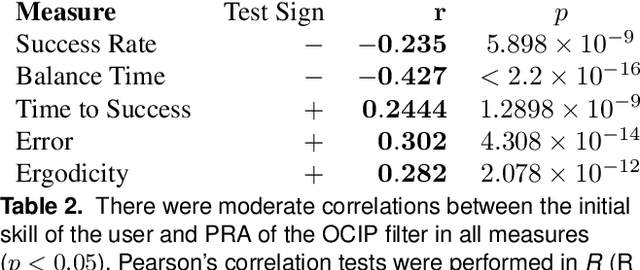
Despite the fact that robotic platforms can provide both consistent practice and objective assessments of users over the course of their training, there are relatively few instances where physical human robot interaction has been significantly more effective than unassisted practice or human-mediated training. This paper describes a hybrid shared control robot, which enhances task learning through kinesthetic feedback. The assistance assesses user actions using a task-specific evaluation criterion and selectively accepts or rejects them at each time instant. Through two human subject studies (total n=68), we show that this hybrid approach of switching between full transparency and full rejection of user inputs leads to increased skill acquisition and short-term retention compared to unassisted practice. Moreover, we show that the shared control paradigm exhibits features previously shown to promote successful training. It avoids user passivity by only rejecting user actions and allowing failure at the task. It improves performance during assistance, providing meaningful task-specific feedback. It is sensitive to initial skill of the user and behaves as an `assist-as-needed' control scheme---adapting its engagement in real time based on the performance and needs of the user. Unlike other successful algorithms, it does not require explicit modulation of the level of impedance or error amplification during training and it is permissive to a range of strategies because of its evaluation criterion. We demonstrate that the proposed hybrid shared control paradigm with a task-based minimal intervention criterion significantly enhances task-specific training.