 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat we see and What we don't see: Imputing Occluded Crowd Structures from Robot Sensing
Sep 17, 2021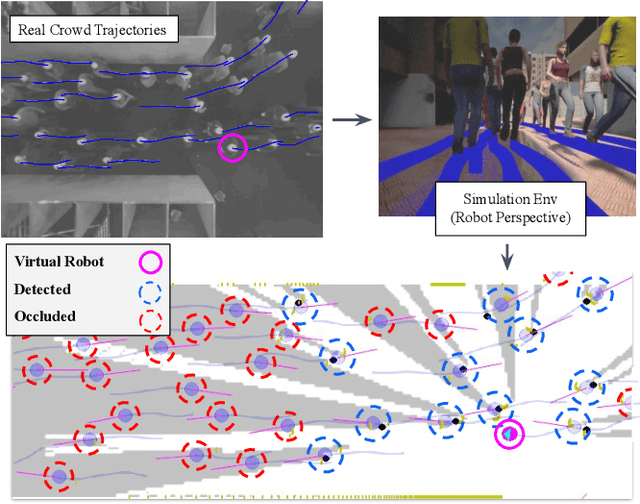
We consider the navigation of mobile robots in crowded environments, for which onboard sensing of the crowd is typically limited by occlusions. We address the problem of inferring the human occupancy in the space around the robot, in blind spots, beyond the range of its sensing capabilities. This problem is rather unexplored in spite of the important impact it has on the robot crowd navigation efficiency and safety, which requires the estimation and the prediction of the crowd state around it. In this work, we propose the first solution to sample predictions of possible human presence based on the state of a fewer set of sensed people around the robot as well as previous observations of the crowd activity.
Tracking Pedestrian Heads in Dense Crowd
Mar 24, 2021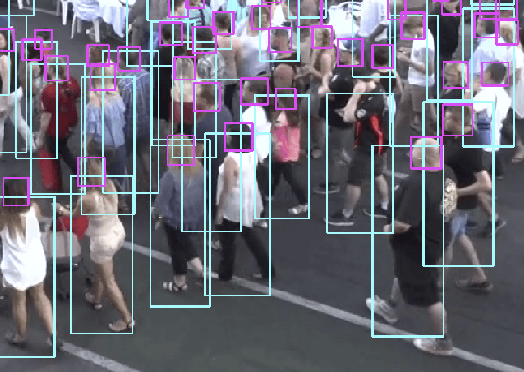
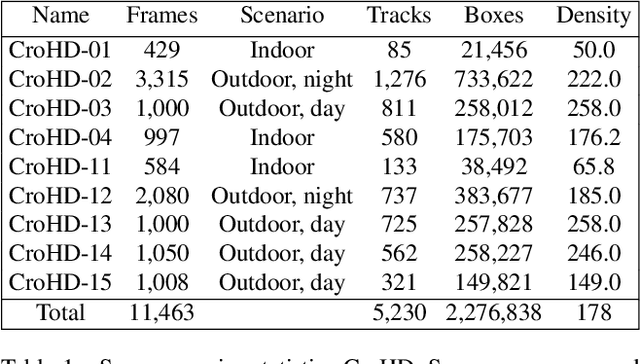
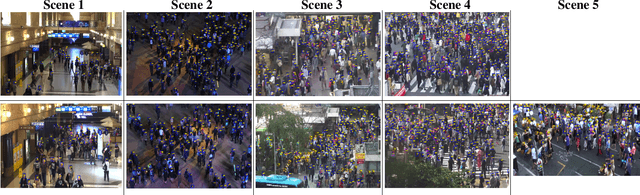
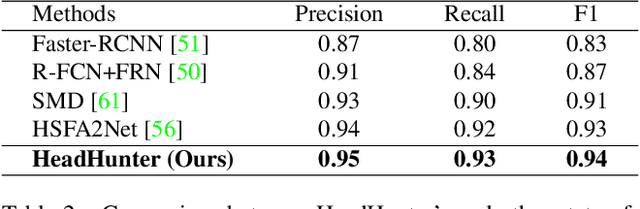
Tracking humans in crowded video sequences is an important constituent of visual scene understanding. Increasing crowd density challenges visibility of humans, limiting the scalability of existing pedestrian trackers to higher crowd densities. For that reason, we propose to revitalize head tracking with Crowd of Heads Dataset (CroHD), consisting of 9 sequences of 11,463 frames with over 2,276,838 heads and 5,230 tracks annotated in diverse scenes. For evaluation, we proposed a new metric, IDEucl, to measure an algorithm's efficacy in preserving a unique identity for the longest stretch in image coordinate space, thus building a correspondence between pedestrian crowd motion and the performance of a tracking algorithm. Moreover, we also propose a new head detector, HeadHunter, which is designed for small head detection in crowded scenes. We extend HeadHunter with a Particle Filter and a color histogram based re-identification module for head tracking. To establish this as a strong baseline, we compare our tracker with existing state-of-the-art pedestrian trackers on CroHD and demonstrate superiority, especially in identity preserving tracking metrics. With a light-weight head detector and a tracker which is efficient at identity preservation, we believe our contributions will serve useful in advancement of pedestrian tracking in dense crowds.
OpenTraj: Assessing Prediction Complexity in Human Trajectories Datasets
Oct 02, 2020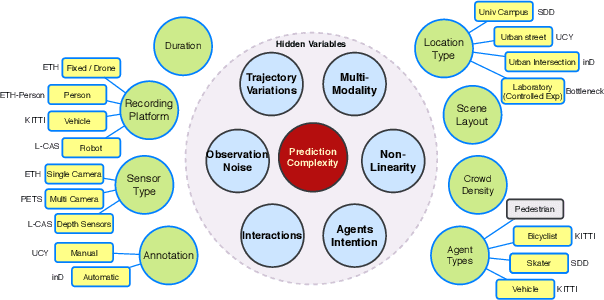
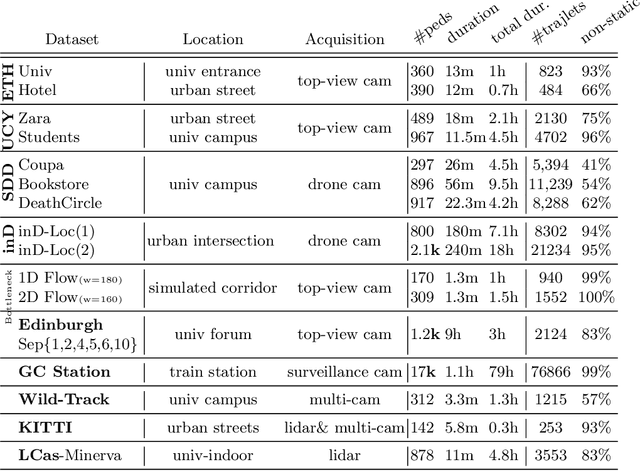
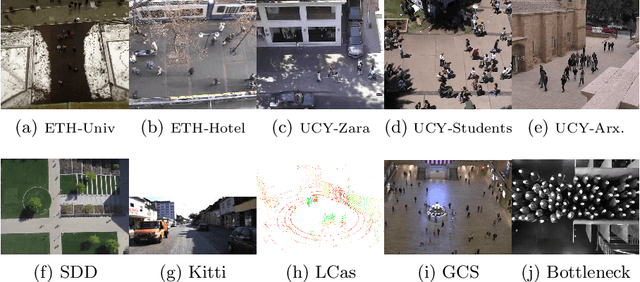
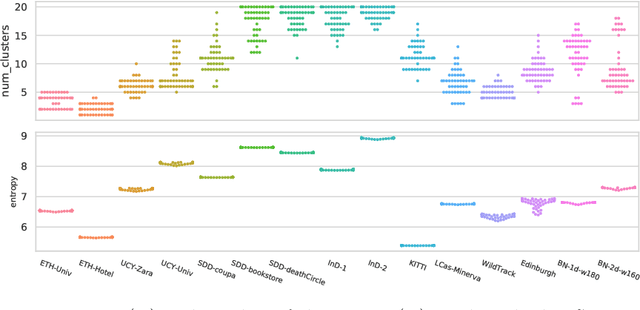
Human Trajectory Prediction (HTP) has gained much momentum in the last years and many solutions have been proposed to solve it. Proper benchmarking being a key issue for comparing methods, this paper addresses the question of evaluating how complex is a given dataset with respect to the prediction problem. For assessing a dataset complexity, we define a series of indicators around three concepts: Trajectory predictability; Trajectory regularity; Context complexity. We compare the most common datasets used in HTP in the light of these indicators and discuss what this may imply on benchmarking of HTP algorithms. Our source code is released on
Social Ways: Learning Multi-Modal Distributions of Pedestrian Trajectories with GANs
Apr 24, 2019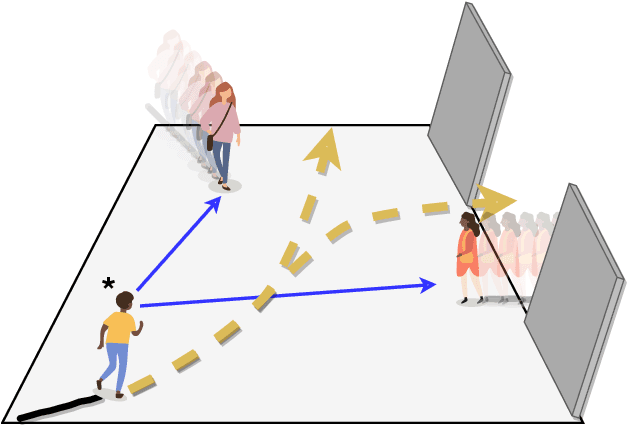

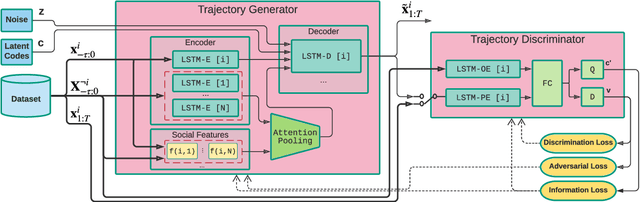
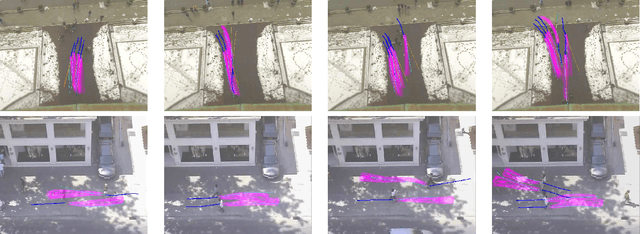
This paper proposes a novel approach for predicting the motion of pedestrians interacting with others. It uses a Generative Adversarial Network (GAN) to sample plausible predictions for any agent in the scene. As GANs are very susceptible to mode collapsing and dropping, we show that the recently proposed Info-GAN allows dramatic improvements in multi-modal pedestrian trajectory prediction to avoid these issues. We also left out L2-loss in training the generator, unlike some previous works, because it causes serious mode collapsing though faster convergence. We show through experiments on real and synthetic data that the proposed method leads to generate more diverse samples and to preserve the modes of the predictive distribution. In particular, to prove this claim, we have designed a toy example dataset of trajectories that can be used to assess the performance of different methods in preserving the predictive distribution modes.