 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDVM-SLAM: Decentralized Visual Monocular Simultaneous Localization and Mapping for Multi-Agent Systems
Mar 06, 2025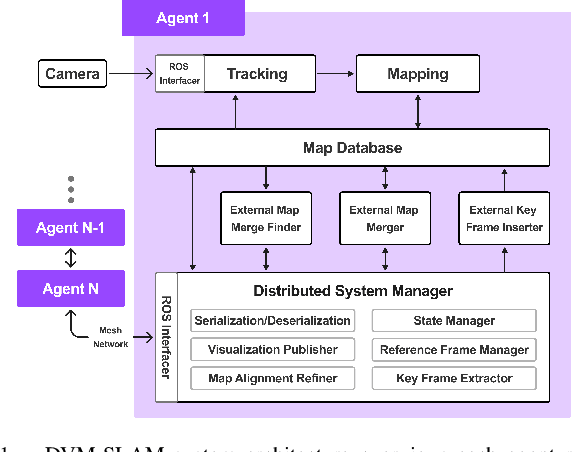
Cooperative Simultaneous Localization and Mapping (C-SLAM) enables multiple agents to work together in mapping unknown environments while simultaneously estimating their own positions. This approach enhances robustness, scalability, and accuracy by sharing information between agents, reducing drift, and enabling collective exploration of larger areas. In this paper, we present Decentralized Visual Monocular SLAM (DVM-SLAM), the first open-source decentralized monocular C-SLAM system. By only utilizing low-cost and light-weight monocular vision sensors, our system is well suited for small robots and micro aerial vehicles (MAVs). DVM-SLAM's real-world applicability is validated on physical robots with a custom collision avoidance framework, showcasing its potential in real-time multi-agent autonomous navigation scenarios. We also demonstrate comparable accuracy to state-of-the-art centralized monocular C-SLAM systems. We open-source our code and provide supplementary material online.
The Cambridge RoboMaster: An Agile Multi-Robot Research Platform
May 03, 2024Compact robotic platforms with powerful compute and actuation capabilities are key enablers for practical, real-world deployments of multi-agent research. This article introduces a tightly integrated hardware, control, and simulation software stack on a fleet of holonomic ground robot platforms designed with this motivation. Our robots, a fleet of customised DJI Robomaster S1 vehicles, offer a balance between small robots that do not possess sufficient compute or actuation capabilities and larger robots that are unsuitable for indoor multi-robot tests. They run a modular ROS2-based optimal estimation and control stack for full onboard autonomy, contain ad-hoc peer-to-peer communication infrastructure, and can zero-shot run multi-agent reinforcement learning (MARL) policies trained in our vectorized multi-agent simulation framework. We present an in-depth review of other platforms currently available, showcase new experimental validation of our system's capabilities, and introduce case studies that highlight the versatility and reliabilty of our system as a testbed for a wide range of research demonstrations. Our system as well as supplementary material is available online: https://proroklab.github.io/cambridge-robomaster