 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgesiaNMS: Non-Maximum Suppression with Siamese Networks for Multi-Camera 3D Object Detection
Feb 19, 2020

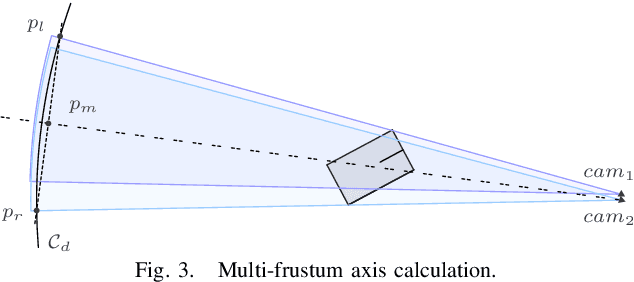
The rapid development of embedded hardware in autonomous vehicles broadens their computational capabilities, thus bringing the possibility to mount more complete sensor setups able to handle driving scenarios of higher complexity. As a result, new challenges such as multiple detections of the same object have to be addressed. In this work, a siamese network is integrated into the pipeline of a well-known 3D object detector approach to suppress duplicate proposals coming from different cameras via re-identification. Additionally, associations are exploited to enhance the 3D box regression of the object by aggregating their corresponding LiDAR frustums. The experimental evaluation on the nuScenes dataset shows that the proposed method outperforms traditional NMS approaches.
BirdNet: a 3D Object Detection Framework from LiDAR information
May 03, 2018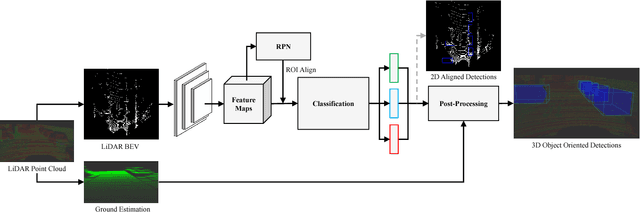
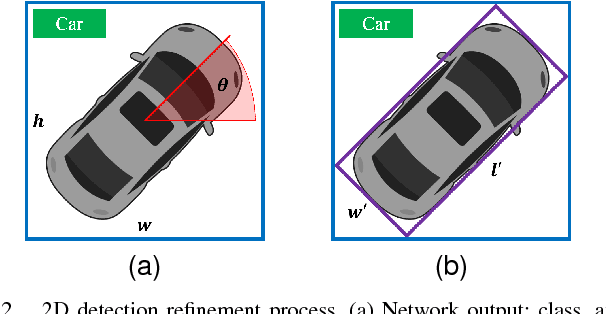
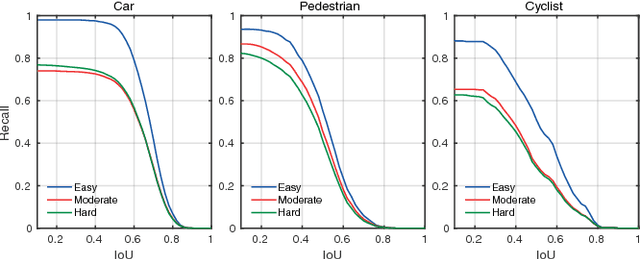
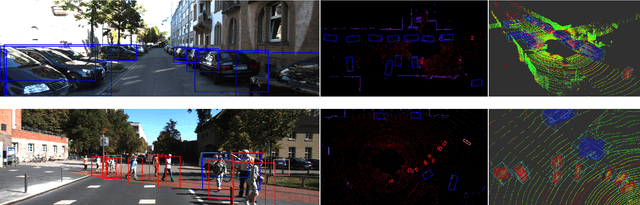
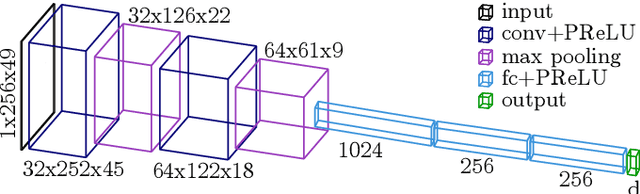
Understanding driving situations regardless the conditions of the traffic scene is a cornerstone on the path towards autonomous vehicles; however, despite common sensor setups already include complementary devices such as LiDAR or radar, most of the research on perception systems has traditionally focused on computer vision. We present a LiDAR-based 3D object detection pipeline entailing three stages. First, laser information is projected into a novel cell encoding for bird's eye view projection. Later, both object location on the plane and its heading are estimated through a convolutional neural network originally designed for image processing. Finally, 3D oriented detections are computed in a post-processing phase. Experiments on KITTI dataset show that the proposed framework achieves state-of-the-art results among comparable methods. Further tests with different LiDAR sensors in real scenarios assess the multi-device capabilities of the approach.