 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs 'Right' Right? Enhancing Object Orientation Understanding in Multimodal Language Models through Egocentric Instruction Tuning
Nov 24, 2024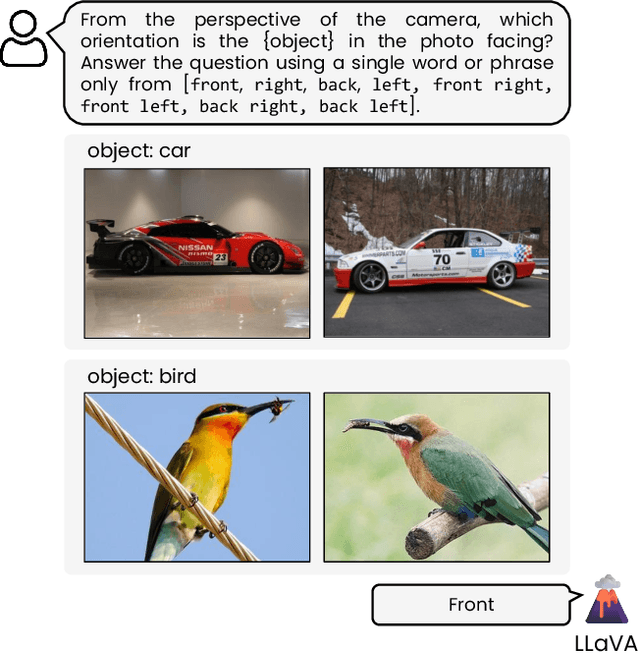
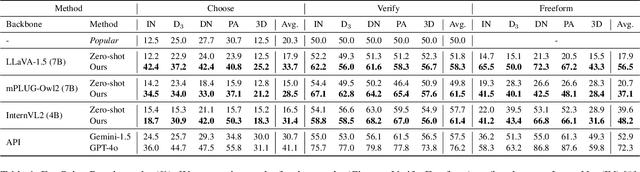
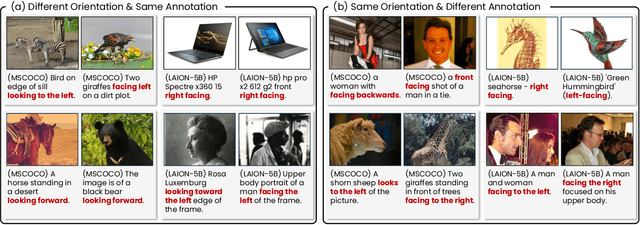
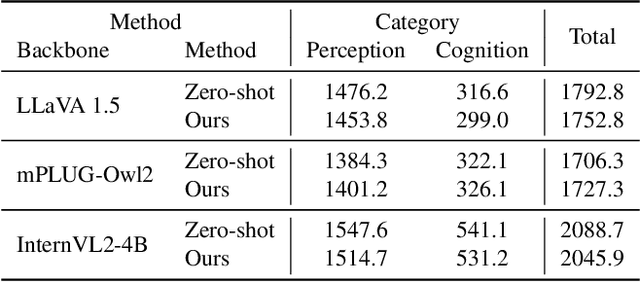
Multimodal large language models (MLLMs) act as essential interfaces, connecting humans with AI technologies in multimodal applications. However, current MLLMs face challenges in accurately interpreting object orientation in images due to inconsistent orientation annotations in training data, hindering the development of a coherent orientation understanding. To overcome this, we propose egocentric instruction tuning, which aligns MLLMs' orientation understanding with the user's perspective, based on a consistent annotation standard derived from the user's egocentric viewpoint. We first generate egocentric instruction data that leverages MLLMs' ability to recognize object details and applies prior knowledge for orientation understanding. Using this data, we perform instruction tuning to enhance the model's capability for accurate orientation interpretation. In addition, we introduce EgoOrientBench, a benchmark that evaluates MLLMs' orientation understanding across three tasks using images collected from diverse domains. Experimental results on this benchmark show that egocentric instruction tuning significantly improves orientation understanding without compromising overall MLLM performance. The instruction data and benchmark dataset are available on our project page at https://github.com/jhCOR/EgoOrientBench.
Towards Scalable Multi-View Reconstruction of Geometry and Materials
Jun 06, 2023In this paper, we propose a novel method for joint recovery of camera pose, object geometry and spatially-varying Bidirectional Reflectance Distribution Function (svBRDF) of 3D scenes that exceed object-scale and hence cannot be captured with stationary light stages. The input are high-resolution RGB-D images captured by a mobile, hand-held capture system with point lights for active illumination. Compared to previous works that jointly estimate geometry and materials from a hand-held scanner, we formulate this problem using a single objective function that can be minimized using off-the-shelf gradient-based solvers. To facilitate scalability to large numbers of observation views and optimization variables, we introduce a distributed optimization algorithm that reconstructs 2.5D keyframe-based representations of the scene. A novel multi-view consistency regularizer effectively synchronizes neighboring keyframes such that the local optimization results allow for seamless integration into a globally consistent 3D model. We provide a study on the importance of each component in our formulation and show that our method compares favorably to baselines. We further demonstrate that our method accurately reconstructs various objects and materials and allows for expansion to spatially larger scenes. We believe that this work represents a significant step towards making geometry and material estimation from hand-held scanners scalable.