 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Cell Training on Architecture Search for Image Denoising
Dec 13, 2022Neural Architecture Search (NAS) for automatically finding the optimal network architecture has shown some success with competitive performances in various computer vision tasks. However, NAS in general requires a tremendous amount of computations. Thus reducing computational cost has emerged as an important issue. Most of the attempts so far has been based on manual approaches, and often the architectures developed from such efforts dwell in the balance of the network optimality and the search cost. Additionally, recent NAS methods for image restoration generally do not consider dynamic operations that may transform dimensions of feature maps because of the dimensionality mismatch in tensor calculations. This can greatly limit NAS in its search for optimal network structure. To address these issues, we re-frame the optimal search problem by focusing at component block level. From previous work, it's been shown that an effective denoising block can be connected in series to further improve the network performance. By focusing at block level, the search space of reinforcement learning becomes significantly smaller and evaluation process can be conducted more rapidly. In addition, we integrate an innovative dimension matching modules for dealing with spatial and channel-wise mismatch that may occur in the optimal design search. This allows much flexibility in optimal network search within the cell block. With these modules, then we employ reinforcement learning in search of an optimal image denoising network at a module level. Computational efficiency of our proposed Denoising Prior Neural Architecture Search (DPNAS) was demonstrated by having it complete an optimal architecture search for an image restoration task by just one day with a single GPU.
CPNet: Cross-Parallel Network for Efficient Anomaly Detection
Aug 13, 2021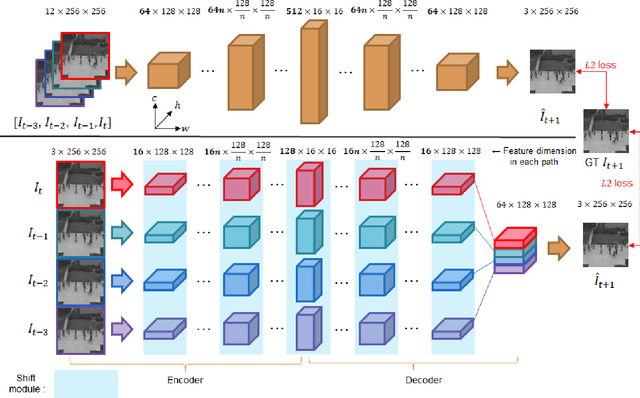
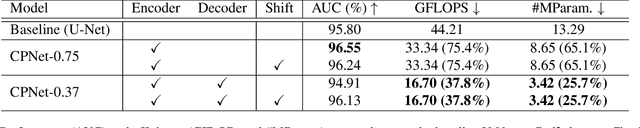
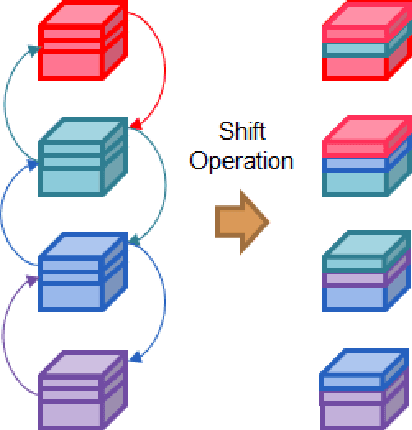
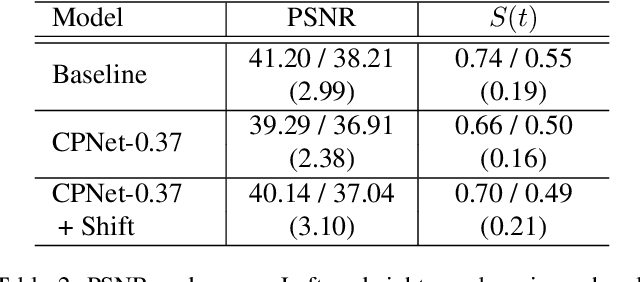
Anomaly detection in video streams is a challenging problem because of the scarcity of abnormal events and the difficulty of accurately annotating them. To alleviate these issues, unsupervised learning-based prediction methods have been previously applied. These approaches train the model with only normal events and predict a future frame from a sequence of preceding frames by use of encoder-decoder architectures so that they result in small prediction errors on normal events but large errors on abnormal events. The architecture, however, comes with the computational burden as some anomaly detection tasks require low computational cost without sacrificing performance. In this paper, Cross-Parallel Network (CPNet) for efficient anomaly detection is proposed here to minimize computations without performance drops. It consists of N smaller parallel U-Net, each of which is designed to handle a single input frame, to make the calculations significantly more efficient. Additionally, an inter-network shift module is incorporated to capture temporal relationships among sequential frames to enable more accurate future predictions.The quantitative results show that our model requires less computational cost than the baseline U-Net while delivering equivalent performance in anomaly detection.