 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Object Placement with Pose Distance Estimations for Different Objects and Grippers
Oct 03, 2021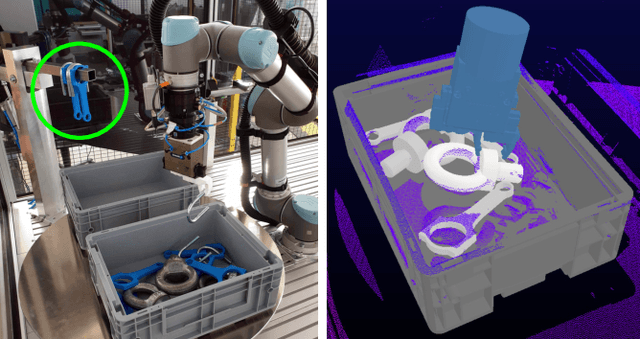

This paper introduces a novel approach for the grasping and precise placement of various known rigid objects using multiple grippers within highly cluttered scenes. Using a single depth image of the scene, our method estimates multiple 6D object poses together with an object class, a pose distance for object pose estimation, and a pose distance from a target pose for object placement for each automatically obtained grasp pose with a single forward pass of a neural network. By incorporating model knowledge into the system, our approach has higher success rates for grasping than state-of-the-art model-free approaches. Furthermore, our method chooses grasps that result in significantly more precise object placements than prior model-based work.