 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Integrated System for Perception-Driven Autonomy with Modular Robots
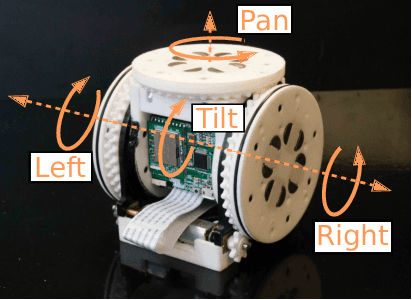
Dec 13, 2018The theoretical ability of modular robots to reconfigure in response to complex tasks in a priori unknown environments has frequently been cited as an advantage and remains a major motivator for work in the field. We present a modular robot system capable of autonomously completing high-level tasks by reactively reconfiguring to meet the needs of a perceived, a priori unknown environment. The system integrates perception, high-level planning, and modular hardware, and is validated in three hardware demonstrations. Given a high-level task specification, a modular robot autonomously explores an unknown environment, decides when and how to reconfigure, and manipulates objects to complete its task. The system architecture balances distributed mechanical elements with centralized perception, planning, and control. By providing an example of how a modular robot system can be designed to leverage reactive reconfigurability in unknown environments, we have begun to lay the groundwork for modular self-reconfigurable robots to address tasks in the real world.
* Published article available at: http://robotics.sciencemag.org/cgi/content/full/3/23/eaat4983?ijkey=iBq7yW7Z8vmjE&keytype=ref&siteid=robotics
Perception-Informed Autonomous Environment Augmentation With Modular Robots
Mar 01, 2018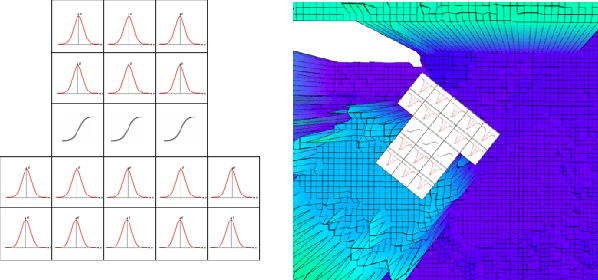
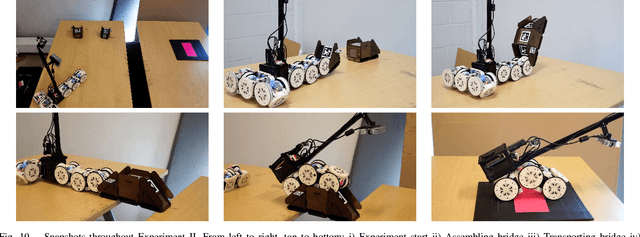
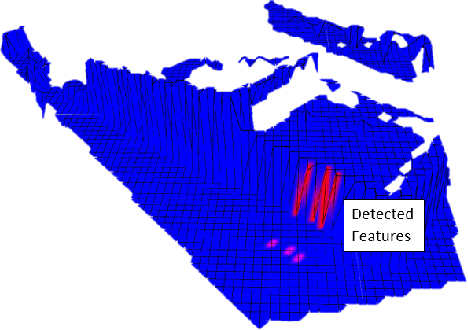
We present a system enabling a modular robot to autonomously build structures in order to accomplish high-level tasks. Building structures allows the robot to surmount large obstacles, expanding the set of tasks it can perform. This addresses a common weakness of modular robot systems, which often struggle to traverse large obstacles. This paper presents the hardware, perception, and planning tools that comprise our system. An environment characterization algorithm identifies features in the environment that can be augmented to create a path between two disconnected regions of the environment. Specially-designed building blocks enable the robot to create structures that can augment the environment to make obstacles traversable. A high-level planner reasons about the task, robot locomotion capabilities, and environment to decide if and where to augment the environment in order to perform the desired task. We validate our system in hardware experiments