 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefining Obstacle Perception Safety Zones via Maneuver-Based Decomposition
Aug 11, 2023



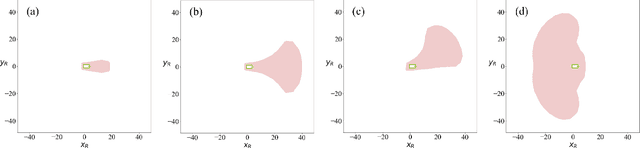
A critical task for developing safe autonomous driving stacks is to determine whether an obstacle is safety-critical, i.e., poses an imminent threat to the autonomous vehicle. Our previous work showed that Hamilton Jacobi reachability theory can be applied to compute interaction-dynamics-aware perception safety zones that better inform an ego vehicle's perception module which obstacles are considered safety-critical. For completeness, these zones are typically larger than absolutely necessary, forcing the perception module to pay attention to a larger collection of objects for the sake of conservatism. As an improvement, we propose a maneuver-based decomposition of our safety zones that leverages information about the ego maneuver to reduce the zone volume. In particular, we propose a "temporal convolution" operation that produces safety zones for specific ego maneuvers, thus limiting the ego's behavior to reduce the size of the safety zones. We show with numerical experiments that maneuver-based zones are significantly smaller (up to 76% size reduction) than the baseline while maintaining completeness.
Interaction-Dynamics-Aware Perception Zones for Obstacle Detection Safety Evaluation
Jun 24, 2022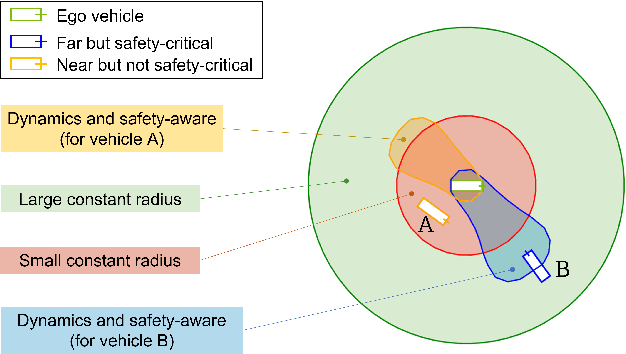
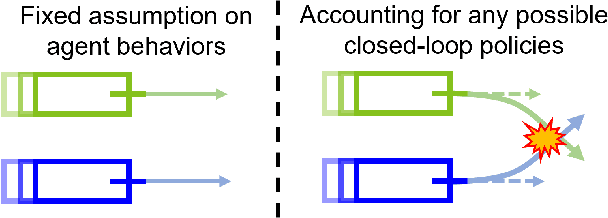
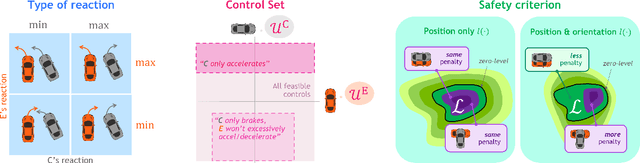
To enable safe autonomous vehicle (AV) operations, it is critical that an AV's obstacle detection module can reliably detect obstacles that pose a safety threat (i.e., are safety-critical). It is therefore desirable that the evaluation metric for the perception system captures the safety-criticality of objects. Unfortunately, existing perception evaluation metrics tend to make strong assumptions about the objects and ignore the dynamic interactions between agents, and thus do not accurately capture the safety risks in reality. To address these shortcomings, we introduce an interaction-dynamics-aware obstacle detection evaluation metric by accounting for closed-loop dynamic interactions between an ego vehicle and obstacles in the scene. By borrowing existing theory from optimal control theory, namely Hamilton-Jacobi reachability, we present a computationally tractable method for constructing a ``safety zone'': a region in state space that defines where safety-critical obstacles lie for the purpose of defining safety metrics. Our proposed safety zone is mathematically complete, and can be easily computed to reflect a variety of safety requirements. Using an off-the-shelf detection algorithm from the nuScenes detection challenge leaderboard, we demonstrate that our approach is computationally lightweight, and can better capture safety-critical perception errors than a baseline approach.