 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExposure-Conscious Path Planning for Equal-Exposure Corridors
Mar 04, 2024While maximizing line-of-sight coverage of specific regions or agents in the environment is a well explored path planning objective, the converse problem of minimizing exposure to the entire environment during navigation is especially interesting in the context of minimizing detection risk. This work demonstrates that minimizing line-of-sight exposure to the environment is non-Markovian, which cannot be efficiently solved optimally with traditional path planning. The optimality gap of the graph-search algorithm A* and the trade-offs in optimality vs. computation time of several approximating heuristics is explored. Finally, the concept of equal-exposure corridors, which afford polynomial time determination of all paths that do not increase exposure, is presented.
NAUTS: Negotiation for Adaptation to Unstructured Terrain Surfaces
Jul 28, 2022
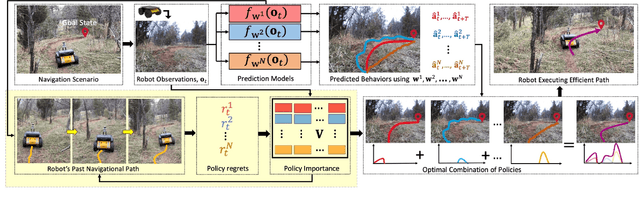

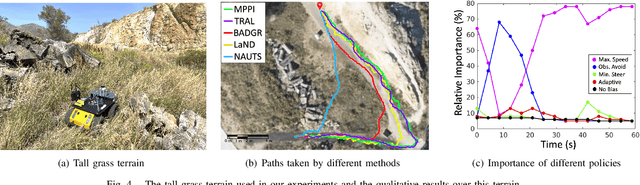
When robots operate in real-world off-road environments with unstructured terrains, the ability to adapt their navigational policy is critical for effective and safe navigation. However, off-road terrains introduce several challenges to robot navigation, including dynamic obstacles and terrain uncertainty, leading to inefficient traversal or navigation failures. To address these challenges, we introduce a novel approach for adaptation by negotiation that enables a ground robot to adjust its navigational behaviors through a negotiation process. Our approach first learns prediction models for various navigational policies to function as a terrain-aware joint local controller and planner. Then, through a new negotiation process, our approach learns from various policies' interactions with the environment to agree on the optimal combination of policies in an online fashion to adapt robot navigation to unstructured off-road terrains on the fly. Additionally, we implement a new optimization algorithm that offers the optimal solution for robot negotiation in real-time during execution. Experimental results have validated that our method for adaptation by negotiation outperforms previous methods for robot navigation, especially over unseen and uncertain dynamic terrains.
Self-Reflective Terrain-Aware Robot Adaptation for Consistent Off-Road Ground Navigation
Nov 12, 2021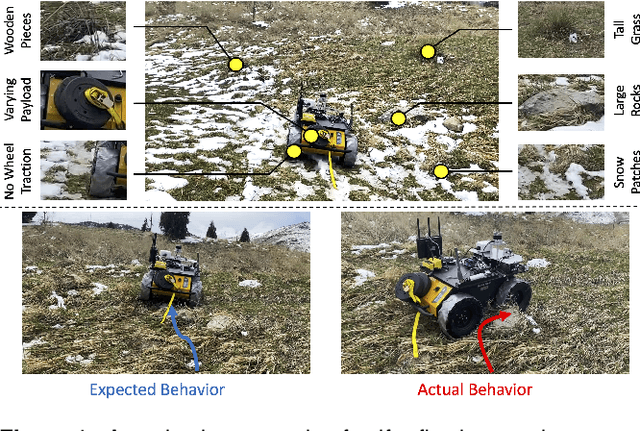



Ground robots require the crucial capability of traversing unstructured and unprepared terrains and avoiding obstacles to complete tasks in real-world robotics applications such as disaster response. When a robot operates in off-road field environments such as forests, the robot's actual behaviors often do not match its expected or planned behaviors, due to changes in the characteristics of terrains and the robot itself. Therefore, the capability of robot adaptation for consistent behavior generation is essential for maneuverability on unstructured off-road terrains. In order to address the challenge, we propose a novel method of self-reflective terrain-aware adaptation for ground robots to generate consistent controls to navigate over unstructured off-road terrains, which enables robots to more accurately execute the expected behaviors through robot self-reflection while adapting to varying unstructured terrains. To evaluate our method's performance, we conduct extensive experiments using real ground robots with various functionality changes over diverse unstructured off-road terrains. The comprehensive experimental results have shown that our self-reflective terrain-aware adaptation method enables ground robots to generate consistent navigational behaviors and outperforms the compared previous and baseline techniques.
Robot Adaptation for Generating Consistent Navigational Behaviors over Unstructured Off-Road Terrain
Jan 01, 2021



Terrain adaptation is an essential capability for a ground robot to effectively traverse unstructured off-road terrain in real-world field environments such as forests. However, the expected robot behaviors generated by terrain adaptation methods cannot always be executed accurately due to setbacks such as wheel slip and reduced tire pressure. To address this problem, we propose a novel approach for consistent behavior generation that enables the ground robot's actual behaviors to more accurately match expected behaviors while adapting to a variety of unstructured off-road terrain. Our approach learns offset behaviors that are used to compensate for the inconsistency between the actual and expected behaviors without requiring the explicit modeling of various setbacks. Our approach is also able to estimate the importance of the multi-modal features to improve terrain representations for better adaptation. In addition, we develop an algorithmic solver for our formulated regularized optimization problem, which is guaranteed to converge to the global optimal solution. To evaluate the method, we perform extensive experiments using various unstructured off-road terrain in real-world field environments. Experimental results have validated that our approach enables robots to traverse complex unstructured off-road terrain with more navigational behavior consistency, and it outperforms previous methods, particularly so on challenging terrain.