 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePetri Net Relaxation for Infeasibility Explanation and Sequential Task Planning
Feb 25, 2026Plans often change due to changes in the situation or our understanding of the situation. Sometimes, a feasible plan may not even exist, and identifying such infeasibilities is useful to determine when requirements need adjustment. Common planning approaches focus on efficient one-shot planning in feasible cases rather than updating domains or detecting infeasibility. We propose a Petri net reachability relaxation to enable robust invariant synthesis, efficient goal-unreachability detection, and helpful infeasibility explanations. We further leverage incremental constraint solvers to support goal and constraint updates. Empirically, compared to baselines, our system produces a comparable number of invariants, detects up to 2 times more infeasibilities, performs competitively in one-shot planning, and outperforms in sequential plan updates in the tested domains.
Scaling Motion Planning Infeasibility Proofs
Jun 07, 2024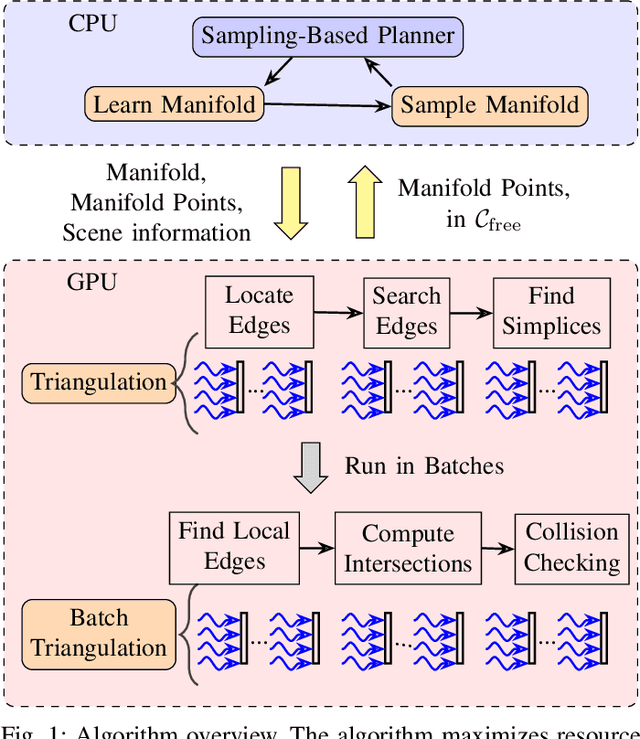
Achieving completeness in the motion planning problem demands substantial computation power, especially in high dimensions. Recent developments in parallel computing have rendered this more achievable. We introduce an embarrassingly parallel algorithm for constructing infeasibility proofs. Specifically, we design and implement a manifold triangulation algorithm on GPUs based on manifold tracing with Coxeter triangulation. To address the challenge of extensive memory usage within limited GPU memory resources during triangulation, we introduce batch triangulation as part of our design. The algorithm provides two orders of magnitude speed-up compared to the previous method for constructing infeasibility proofs. The resulting asymptotically complete motion planning algorithm effectively leverages the computational capabilities of both CPU and GPU architectures and maintains minimum data transfer between the two parts. We perform experiments on 5-DoF and 6-Dof manipulator scenes.
Exposure-Conscious Path Planning for Equal-Exposure Corridors
Mar 04, 2024While maximizing line-of-sight coverage of specific regions or agents in the environment is a well explored path planning objective, the converse problem of minimizing exposure to the entire environment during navigation is especially interesting in the context of minimizing detection risk. This work demonstrates that minimizing line-of-sight exposure to the environment is non-Markovian, which cannot be efficiently solved optimally with traditional path planning. The optimality gap of the graph-search algorithm A* and the trade-offs in optimality vs. computation time of several approximating heuristics is explored. Finally, the concept of equal-exposure corridors, which afford polynomial time determination of all paths that do not increase exposure, is presented.