 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-aware Perception Models for Off-road Autonomous Unmanned Ground Vehicles
Sep 22, 2022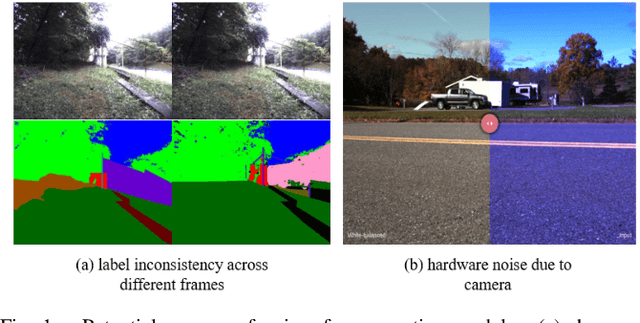
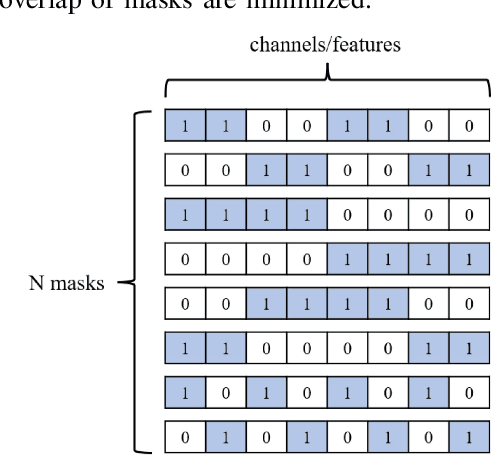
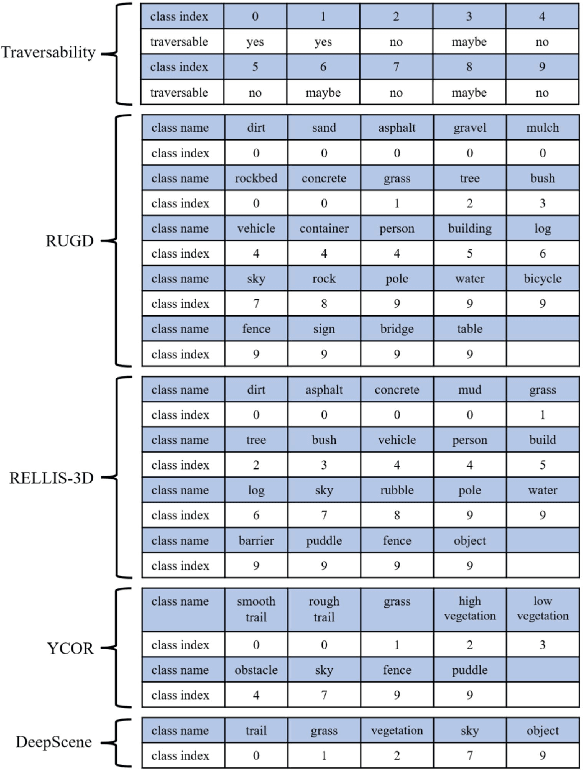
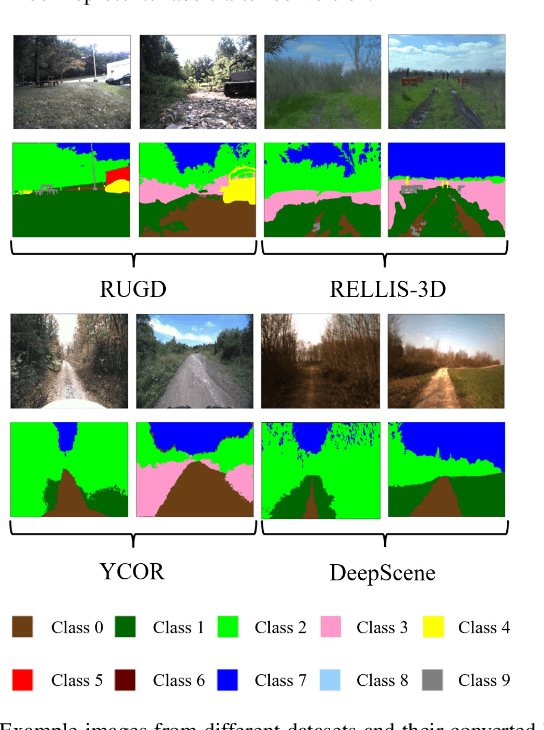
Off-road autonomous unmanned ground vehicles (UGVs) are being developed for military and commercial use to deliver crucial supplies in remote locations, help with mapping and surveillance, and to assist war-fighters in contested environments. Due to complexity of the off-road environments and variability in terrain, lighting conditions, diurnal and seasonal changes, the models used to perceive the environment must handle a lot of input variability. Current datasets used to train perception models for off-road autonomous navigation lack of diversity in seasons, locations, semantic classes, as well as time of day. We test the hypothesis that model trained on a single dataset may not generalize to other off-road navigation datasets and new locations due to the input distribution drift. Additionally, we investigate how to combine multiple datasets to train a semantic segmentation-based environment perception model and we show that training the model to capture uncertainty could improve the model performance by a significant margin. We extend the Masksembles approach for uncertainty quantification to the semantic segmentation task and compare it with Monte Carlo Dropout and standard baselines. Finally, we test the approach against data collected from a UGV platform in a new testing environment. We show that the developed perception model with uncertainty quantification can be feasibly deployed on an UGV to support online perception and navigation tasks.
Artificial Intelligence Enabled Material Behavior Prediction
Jun 12, 2019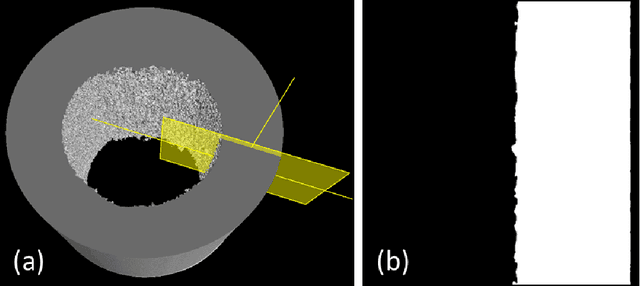
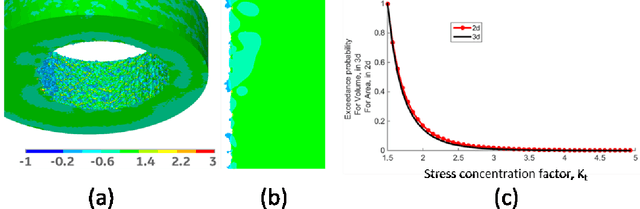
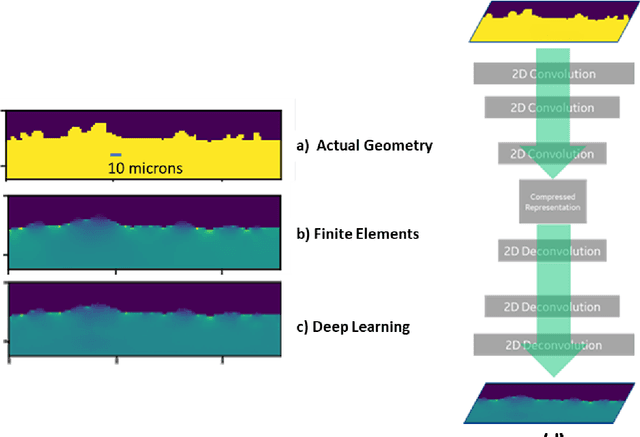
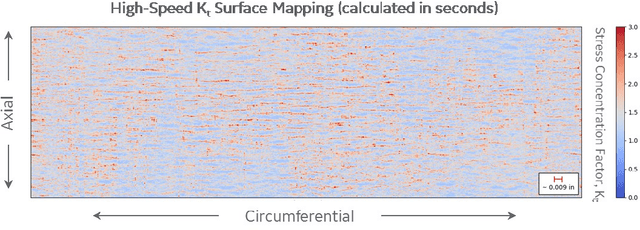
Artificial Intelligence and Machine Learning algorithms have considerable potential to influence the prediction of material properties. Additive materials have a unique property prediction challenge in the form of surface roughness effects on fatigue behavior of structural components. Traditional approaches using finite element methods to calculate stress risers associated with additively built surfaces have been challenging due to the computational resources required, often taking over a day to calculate a single sample prediction. To address this performance challenge, Deep Learning has been employed to enable low cycle fatigue life prediction in additive materials in a matter of seconds.
Design of intentional backdoors in sequential models
Feb 26, 2019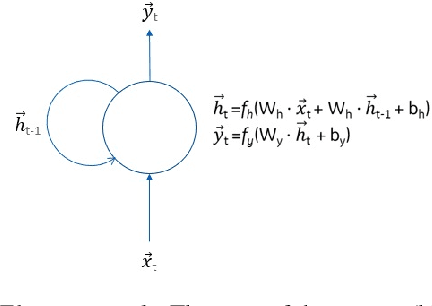
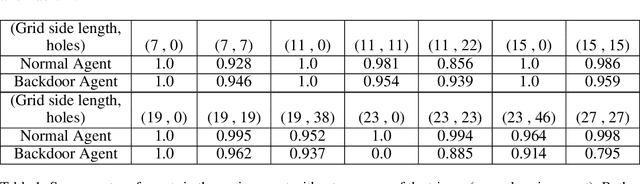
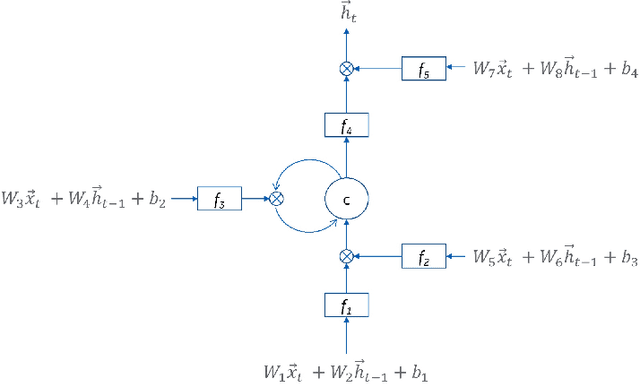
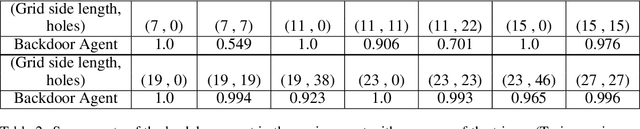
Recent work has demonstrated robust mechanisms by which attacks can be orchestrated on machine learning models. In contrast to adversarial examples, backdoor or trojan attacks embed surgically modified samples with targeted labels in the model training process to cause the targeted model to learn to misclassify chosen samples in the presence of specific triggers, while keeping the model performance stable across other nominal samples. However, current published research on trojan attacks mainly focuses on classification problems, which ignores sequential dependency between inputs. In this paper, we propose methods to discreetly introduce and exploit novel backdoor attacks within a sequential decision-making agent, such as a reinforcement learning agent, by training multiple benign and malicious policies within a single long short-term memory (LSTM) network. We demonstrate the effectiveness as well as the damaging impact of such attacks through initial outcomes generated from our approach, employed on grid-world environments. We also provide evidence as well as intuition on how the trojan trigger and malicious policy is activated. Challenges with network size and unintentional triggers are identified and analogies with adversarial examples are also discussed. In the end, we propose potential approaches to defend against or serve as early detection for such attacks. Results of our work can also be extended to many applications of LSTM and recurrent networks.