 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuously Reliable Detection of New-Normal Misinformation: Semantic Masking and Contrastive Smoothing in High-Density Latent Regions
Jan 19, 2023Toxic misinformation campaigns have caused significant societal harm, e.g., affecting elections and COVID-19 information awareness. Unfortunately, despite successes of (gold standard) retrospective studies of misinformation that confirmed their harmful effects after the fact, they arrive too late for timely intervention and reduction of such harm. By design, misinformation evades retrospective classifiers by exploiting two properties we call new-normal: (1) never-seen-before novelty that cause inescapable generalization challenges for previous classifiers, and (2) massive but short campaigns that end before they can be manually annotated for new classifier training. To tackle these challenges, we propose UFIT, which combines two techniques: semantic masking of strong signal keywords to reduce overfitting, and intra-proxy smoothness regularization of high-density regions in the latent space to improve reliability and maintain accuracy. Evaluation of UFIT on public new-normal misinformation data shows over 30% improvement over existing approaches on future (and unseen) campaigns. To the best of our knowledge, UFIT is the first successful effort to achieve such high level of generalization on new-normal misinformation data with minimal concession (1 to 5%) of accuracy compared to oracles trained with full knowledge of all campaigns.
Time-Aware Datasets are Adaptive Knowledgebases for the New Normal
Nov 22, 2022



Recent advances in text classification and knowledge capture in language models have relied on availability of large-scale text datasets. However, language models are trained on static snapshots of knowledge and are limited when that knowledge evolves. This is especially critical for misinformation detection, where new types of misinformation continuously appear, replacing old campaigns. We propose time-aware misinformation datasets to capture time-critical phenomena. In this paper, we first present evidence of evolving misinformation and show that incorporating even simple time-awareness significantly improves classifier accuracy. Second, we present COVID-TAD, a large-scale COVID-19 misinformation da-taset spanning 25 months. It is the first large-scale misinformation dataset that contains multiple snapshots of a datastream and is orders of magnitude bigger than related misinformation datasets. We describe the collection and labeling pro-cess, as well as preliminary experiments.
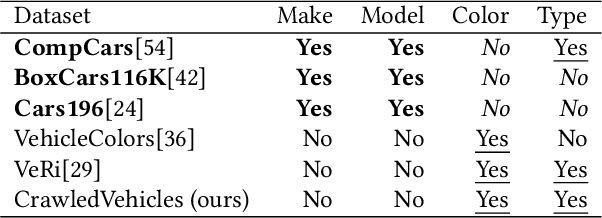
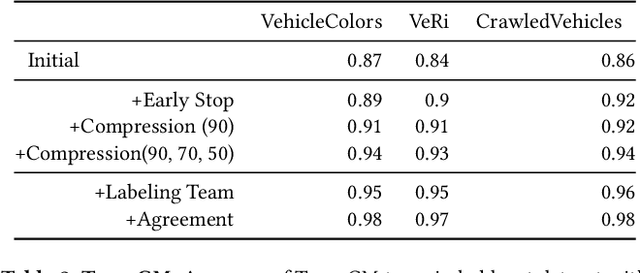
ATEAM: Knowledge Integration from Federated Datasets for Vehicle Feature Extraction using Annotation Team of Experts
Nov 16, 2022



The vehicle recognition area, including vehicle make-model recognition (VMMR), re-id, tracking, and parts-detection, has made significant progress in recent years, driven by several large-scale datasets for each task. These datasets are often non-overlapping, with different label schemas for each task: VMMR focuses on make and model, while re-id focuses on vehicle ID. It is promising to combine these datasets to take advantage of knowledge across datasets as well as increased training data; however, dataset integration is challenging due to the domain gap problem. This paper proposes ATEAM, an annotation team-of-experts to perform cross-dataset labeling and integration of disjoint annotation schemas. ATEAM uses diverse experts, each trained on datasets that contain an annotation schema, to transfer knowledge to datasets without that annotation. Using ATEAM, we integrated several common vehicle recognition datasets into a Knowledge Integrated Dataset (KID). We evaluate ATEAM and KID for vehicle recognition problems and show that our integrated dataset can help off-the-shelf models achieve excellent accuracy on VMMR and vehicle re-id with no changes to model architectures. We achieve mAP of 0.83 on VeRi, and accuracy of 0.97 on CompCars. We have released both the dataset and the ATEAM framework for public use.
EdnaML: A Declarative API and Framework for Reproducible Deep Learning
Nov 13, 2022Machine Learning has become the bedrock of recent advances in text, image, video, and audio processing and generation. Most production systems deal with several models during deployment and training, each with a variety of tuned hyperparameters. Furthermore, data collection and processing aspects of ML pipelines are receiving increasing interest due to their importance in creating sustainable high-quality classifiers. We present EdnaML, a framework with a declarative API for reproducible deep learning. EdnaML provides low-level building blocks that can be composed manually, as well as a high-level pipeline orchestration API to automate data collection, data processing, classifier training, classifier deployment, and model monitoring. Our layered API allows users to manage ML pipelines at high-level component abstractions, while providing flexibility to modify any part of it through the building blocks. We present several examples of ML pipelines with EdnaML, including a large-scale fake news labeling and classification system with six sub-pipelines managed by EdnaML.
Constructive Interpretability with CoLabel: Corroborative Integration, Complementary Features, and Collaborative Learning
May 20, 2022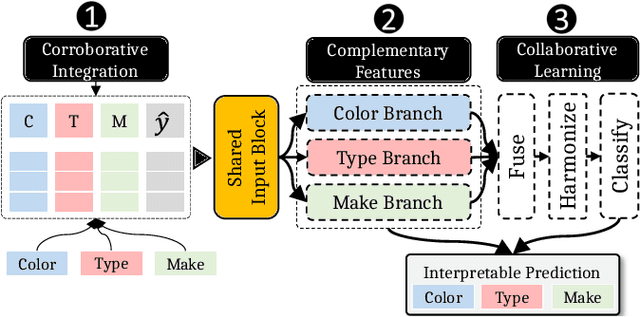
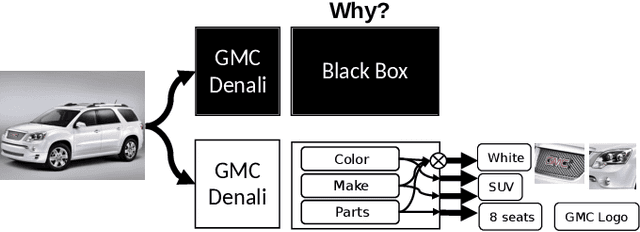
Machine learning models with explainable predictions are increasingly sought after, especially for real-world, mission-critical applications that require bias detection and risk mitigation. Inherent interpretability, where a model is designed from the ground-up for interpretability, provides intuitive insights and transparent explanations on model prediction and performance. In this paper, we present CoLabel, an approach to build interpretable models with explanations rooted in the ground truth. We demonstrate CoLabel in a vehicle feature extraction application in the context of vehicle make-model recognition (VMMR). CoLabel performs VMMR with a composite of interpretable features such as vehicle color, type, and make, all based on interpretable annotations of the ground truth labels. First, CoLabel performs corroborative integration to join multiple datasets that each have a subset of desired annotations of color, type, and make. Then, CoLabel uses decomposable branches to extract complementary features corresponding to desired annotations. Finally, CoLabel fuses them together for final predictions. During feature fusion, CoLabel harmonizes complementary branches so that VMMR features are compatible with each other and can be projected to the same semantic space for classification. With inherent interpretability, CoLabel achieves superior performance to the state-of-the-art black-box models, with accuracy of 0.98, 0.95, and 0.94 on CompCars, Cars196, and BoxCars116K, respectively. CoLabel provides intuitive explanations due to constructive interpretability, and subsequently achieves high accuracy and usability in mission-critical situations.
Small, Accurate, and Fast Vehicle Re-ID on the Edge: the SAFR Approach
Jan 24, 2020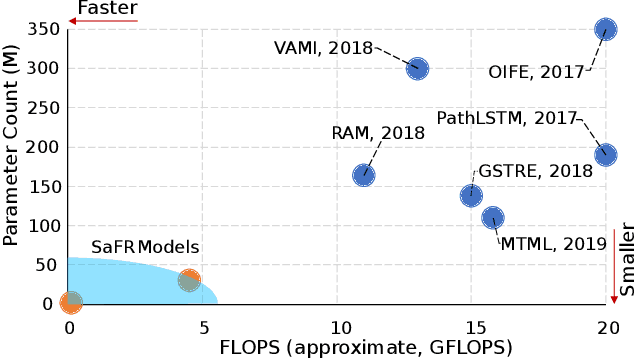

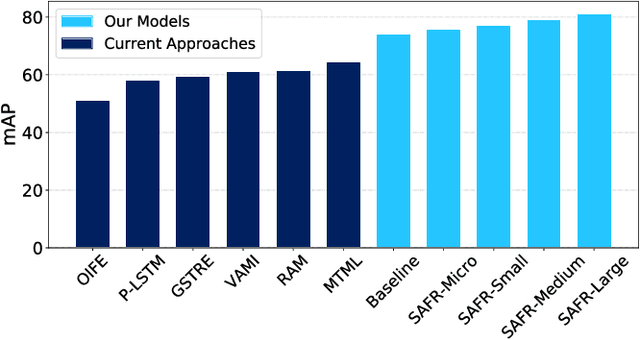
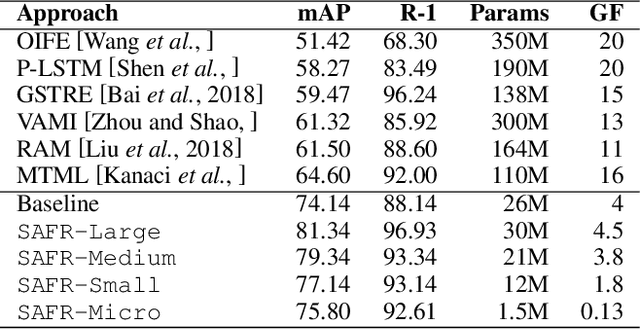
We propose a Small, Accurate, and Fast Re-ID (SAFR) design for flexible vehicle re-id under a variety of compute environments such as cloud, mobile, edge, or embedded devices by only changing the re-id model backbone. Through best-fit design choices, feature extraction, training tricks, global attention, and local attention, we create a reid model design that optimizes multi-dimensionally along model size, speed, & accuracy for deployment under various memory and compute constraints. We present several variations of our flexible SAFR model: SAFR-Large for cloud-type environments with large compute resources, SAFR-Small for mobile devices with some compute constraints, and SAFR-Micro for edge devices with severe memory & compute constraints. SAFR-Large delivers state-of-the-art results with mAP 81.34 on the VeRi-776 vehicle re-id dataset (15% better than related work). SAFR-Small trades a 5.2% drop in performance (mAP 77.14 on VeRi-776) for over 60% model compression and 150% speedup. SAFR-Micro, at only 6MB and 130MFLOPS, trades 6.8% drop in accuracy (mAP 75.80 on VeRi-776) for 95% compression and 33x speedup compared to SAFR-Large.
Robust, Extensible, and Fast: Teamed Classifiers for Vehicle Tracking and Vehicle Re-ID in Multi-Camera Networks
Jan 07, 2020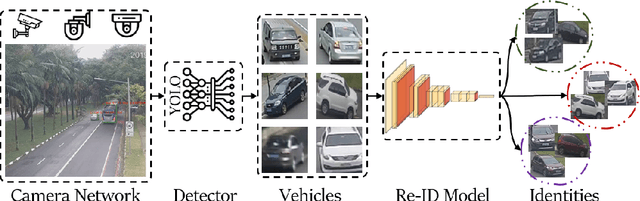
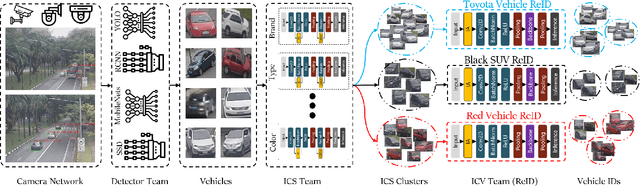
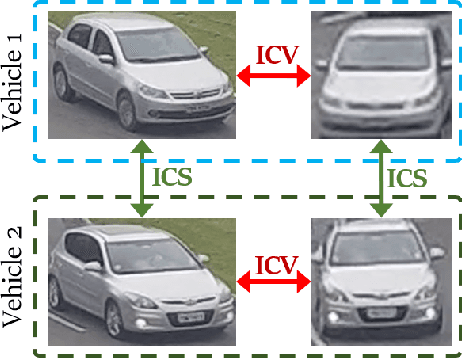
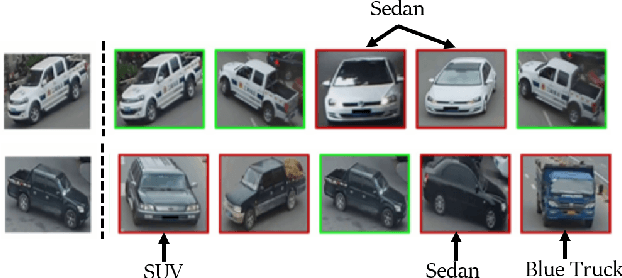
As camera networks have become more ubiquitous over the past decade, the research interest in video management has shifted to analytics on multi-camera networks. This includes performing tasks such as object detection, attribute identification, and vehicle/person tracking across different cameras without overlap. Current frameworks for management are designed for multi-camera networks in a closed dataset environment where there is limited variability in cameras and characteristics of the surveillance environment are well known. Furthermore, current frameworks are designed for offline analytics with guidance from human operators for forensic applications. This paper presents a teamed classifier framework for video analytics in heterogeneous many-camera networks with adversarial conditions such as multi-scale, multi-resolution cameras capturing the environment with varying occlusion, blur, and orientations. We describe an implementation for vehicle tracking and vehicle re-identification (re-id), where we implement a zero-shot learning (ZSL) system that performs automated tracking of all vehicles all the time. Our evaluations on VeRi-776 and Cars196 show the teamed classifier framework is robust to adversarial conditions, extensible to changing video characteristics such as new vehicle types/brands and new cameras, and offers real-time performance compared to current offline video analytics approaches.