 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget Defense with Multiple Defenders and an Agile Attacker via Residual Policy Learning
Feb 25, 2025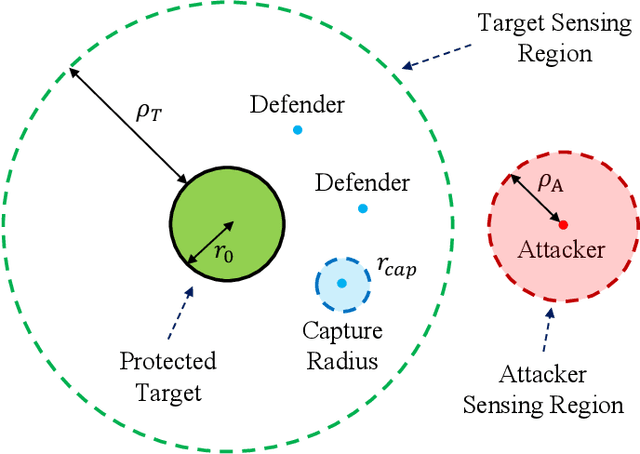
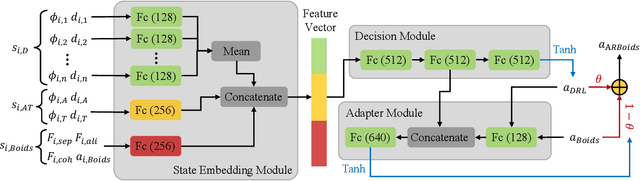
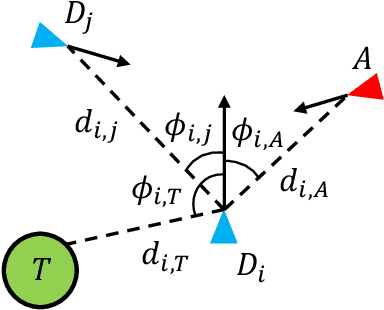
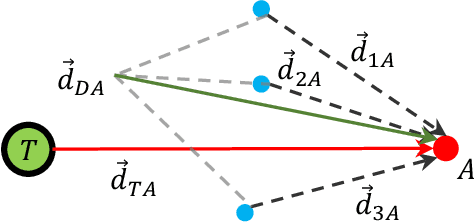
The target defense problem involves intercepting an attacker before it reaches a designated target region using one or more defenders. This letter focuses on a particularly challenging scenario in which the attacker is more agile than the defenders, significantly increasing the difficulty of effective interception. To address this challenge, we propose a novel residual policy framework that integrates deep reinforcement learning (DRL) with the force-based Boids model. In this framework, the Boids model serves as a baseline policy, while DRL learns a residual policy to refine and optimize the defenders' actions. Simulation experiments demonstrate that the proposed method consistently outperforms traditional interception policies, whether learned via vanilla DRL or fine-tuned from force-based methods. Moreover, the learned policy exhibits strong scalability and adaptability, effectively handling scenarios with varying numbers of defenders and attackers with different agility levels.
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
May 17, 2024



Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.