 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntuitive control of supernumerary robotic limbs through a tactile-encoded neural interface
Nov 11, 2025



Brain-computer interfaces (BCIs) promise to extend human movement capabilities by enabling direct neural control of supernumerary effectors, yet integrating augmented commands with multiple degrees of freedom without disrupting natural movement remains a key challenge. Here, we propose a tactile-encoded BCI that leverages sensory afferents through a novel tactile-evoked P300 paradigm, allowing intuitive and reliable decoding of supernumerary motor intentions even when superimposed with voluntary actions. The interface was evaluated in a multi-day experiment comprising of a single motor recognition task to validate baseline BCI performance and a dual task paradigm to assess the potential influence between the BCI and natural human movement. The brain interface achieved real-time and reliable decoding of four supernumerary degrees of freedom, with significant performance improvements after only three days of training. Importantly, after training, performance did not differ significantly between the single- and dual-BCI task conditions, and natural movement remained unimpaired during concurrent supernumerary control. Lastly, the interface was deployed in a movement augmentation task, demonstrating its ability to command two supernumerary robotic arms for functional assistance during bimanual tasks. These results establish a new neural interface paradigm for movement augmentation through stimulation of sensory afferents, expanding motor degrees of freedom without impairing natural movement.
A Novel Deep Neural Network Based Approach for Sparse Code Multiple Access
Jun 19, 2019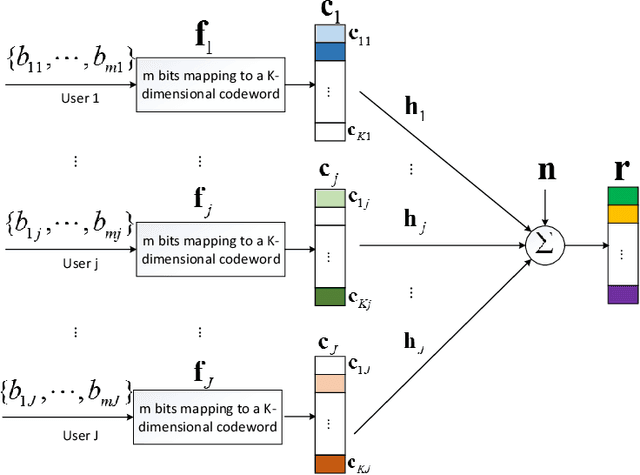
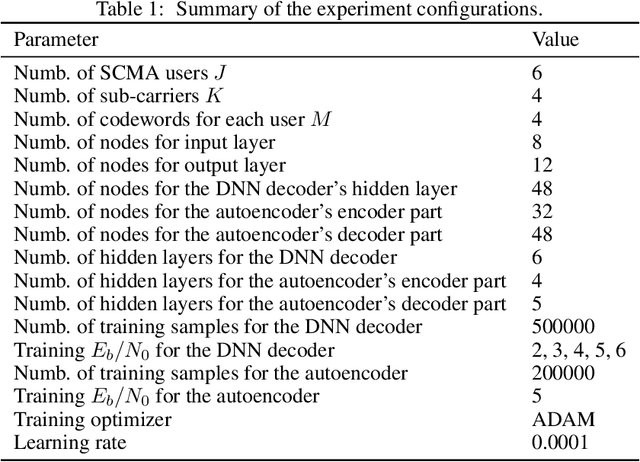
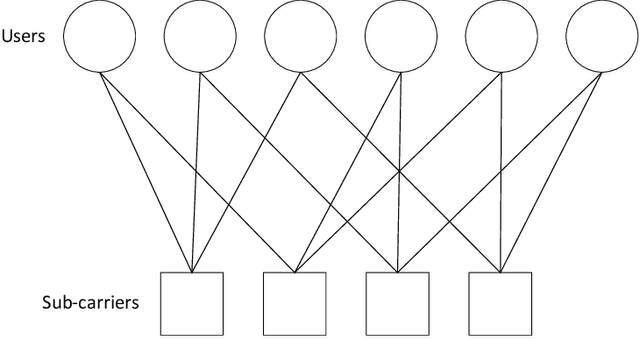

Sparse code multiple access (SCMA) has been one of non-orthogonal multiple access (NOMA) schemes aiming to support high spectral efficiency and ubiquitous access requirements for 5G wireless communication networks. Conventional SCMA approaches are confronting remarkable challenges in designing low complexity high accuracy decoding algorithm and constructing optimum codebooks. Fortunately, the recent spotlighted deep learning technologies are of significant potentials in solving many communication engineering problems. Inspired by this, we explore approaches to improve SCMA performances with the help of deep learning methods. We propose and train a deep neural network (DNN) called DL-SCMA to learn to decode SCMA modulated signals corrupted by additive white Gaussian noise (AWGN). Putting encoding and decoding together, an autoencoder called AE-SCMA is established and trained to generate optimal SCMA codewords and reconstruct original bits. Furthermore, by manipulating the mapping vectors, an autoencoder is able to generalize SCMA, thus a dense code multiple access (DCMA) scheme is proposed. Simulations show that the DNN SCMA decoder significantly outperforms the conventional message passing algorithm (MPA) in terms of bit error rate (BER), symbol error rate (SER) and computational complexity, and AE-SCMA also demonstrates better performances via constructing better SCMA codebooks. The performance of deep learning aided DCMA is superior to the SCMA.