 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscriminative and Semantic Feature Selection for Place Recognition towards Dynamic Environments
Mar 21, 2021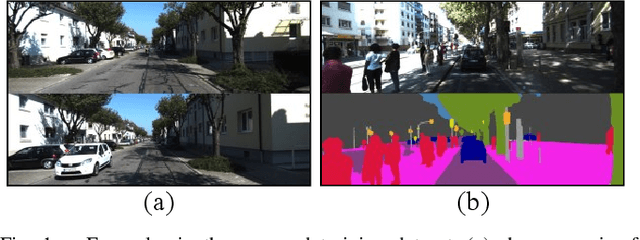
Features play an important role in various visual tasks, especially in visual place recognition applied in perceptual changing environments. In this paper, we address the challenges of place recognition due to dynamics and confusable patterns by proposing a discriminative and semantic feature selection network, dubbed as DSFeat. Supervised by both semantic information and attention mechanism, we can estimate pixel-wise stability of features, indicating the probability of a static and stable region from which features are extracted, and then select features that are insensitive to dynamic interference and distinguishable to be correctly matched. The designed feature selection model is evaluated in place recognition and SLAM system in several public datasets with varying appearances and viewpoints. Experimental results conclude that the effectiveness of the proposed method. It should be noticed that our proposal can be readily pluggable into any feature-based SLAM system.