 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePNAS-MOT: Multi-Modal Object Tracking with Pareto Neural Architecture Search
Mar 23, 2024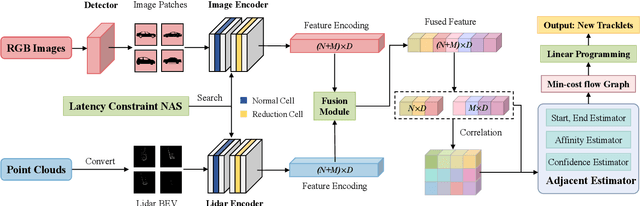



Multiple object tracking is a critical task in autonomous driving. Existing works primarily focus on the heuristic design of neural networks to obtain high accuracy. As tracking accuracy improves, however, neural networks become increasingly complex, posing challenges for their practical application in real driving scenarios due to the high level of latency. In this paper, we explore the use of the neural architecture search (NAS) methods to search for efficient architectures for tracking, aiming for low real-time latency while maintaining relatively high accuracy. Another challenge for object tracking is the unreliability of a single sensor, therefore, we propose a multi-modal framework to improve the robustness. Experiments demonstrate that our algorithm can run on edge devices within lower latency constraints, thus greatly reducing the computational requirements for multi-modal object tracking while keeping lower latency.
* IEEE Robotics and Automation Letters 2024. Code is available at https://github.com/PholyPeng/PNAS-MOT
G-NAS: Generalizable Neural Architecture Search for Single Domain Generalization Object Detection
Feb 07, 2024



In this paper, we focus on a realistic yet challenging task, Single Domain Generalization Object Detection (S-DGOD), where only one source domain's data can be used for training object detectors, but have to generalize multiple distinct target domains. In S-DGOD, both high-capacity fitting and generalization abilities are needed due to the task's complexity. Differentiable Neural Architecture Search (NAS) is known for its high capacity for complex data fitting and we propose to leverage Differentiable NAS to solve S-DGOD. However, it may confront severe over-fitting issues due to the feature imbalance phenomenon, where parameters optimized by gradient descent are biased to learn from the easy-to-learn features, which are usually non-causal and spuriously correlated to ground truth labels, such as the features of background in object detection data. Consequently, this leads to serious performance degradation, especially in generalizing to unseen target domains with huge domain gaps between the source domain and target domains. To address this issue, we propose the Generalizable loss (G-loss), which is an OoD-aware objective, preventing NAS from over-fitting by using gradient descent to optimize parameters not only on a subset of easy-to-learn features but also the remaining predictive features for generalization, and the overall framework is named G-NAS. Experimental results on the S-DGOD urban-scene datasets demonstrate that the proposed G-NAS achieves SOTA performance compared to baseline methods. Codes are available at https://github.com/wufan-cse/G-NAS.