Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLASER: Script Execution by Autonomous Agents for On-demand Traffic Simulation
Oct 21, 2024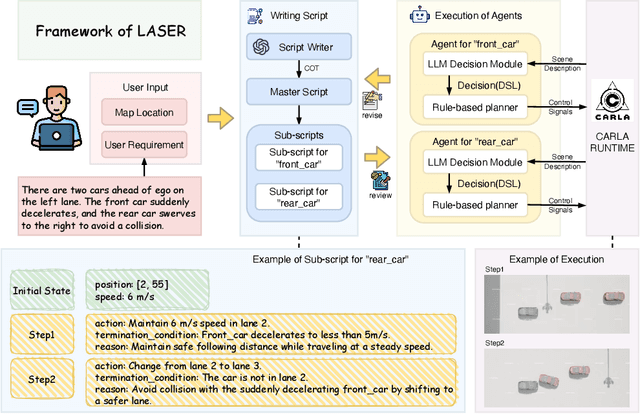
Autonomous Driving Systems (ADS) require diverse and safety-critical traffic scenarios for effective training and testing, but the existing data generation methods struggle to provide flexibility and scalability. We propose LASER, a novel frame-work that leverage large language models (LLMs) to conduct traffic simulations based on natural language inputs. The framework operates in two stages: it first generates scripts from user-provided descriptions and then executes them using autonomous agents in real time. Validated in the CARLA simulator, LASER successfully generates complex, on-demand driving scenarios, significantly improving ADS training and testing data generation.
Via