 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Spatial Distribution Prior Based Attentional Keypoints Matching Network
Nov 23, 2021
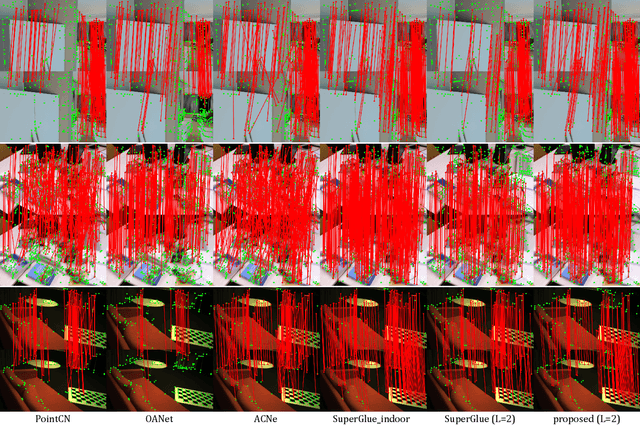


Keypoints matching is a pivotal component for many image-relevant applications such as image stitching, visual simultaneous localization and mapping (SLAM), and so on. Both handcrafted-based and recently emerged deep learning-based keypoints matching methods merely rely on keypoints and local features, while losing sight of other available sensors such as inertial measurement unit (IMU) in the above applications. In this paper, we demonstrate that the motion estimation from IMU integration can be used to exploit the spatial distribution prior of keypoints between images. To this end, a probabilistic perspective of attention formulation is proposed to integrate the spatial distribution prior into the attentional graph neural network naturally. With the assistance of spatial distribution prior, the effort of the network for modeling the hidden features can be reduced. Furthermore, we present a projection loss for the proposed keypoints matching network, which gives a smooth edge between matching and un-matching keypoints. Image matching experiments on visual SLAM datasets indicate the effectiveness and efficiency of the presented method.
FAMINet: Learning Real-time Semi-supervised Video Object Segmentation with Steepest Optimized Optical Flow
Nov 20, 2021



Semi-supervised video object segmentation (VOS) aims to segment a few moving objects in a video sequence, where these objects are specified by annotation of first frame. The optical flow has been considered in many existing semi-supervised VOS methods to improve the segmentation accuracy. However, the optical flow-based semi-supervised VOS methods cannot run in real time due to high complexity of optical flow estimation. A FAMINet, which consists of a feature extraction network (F), an appearance network (A), a motion network (M), and an integration network (I), is proposed in this study to address the abovementioned problem. The appearance network outputs an initial segmentation result based on static appearances of objects. The motion network estimates the optical flow via very few parameters, which are optimized rapidly by an online memorizing algorithm named relaxed steepest descent. The integration network refines the initial segmentation result using the optical flow. Extensive experiments demonstrate that the FAMINet outperforms other state-of-the-art semi-supervised VOS methods on the DAVIS and YouTube-VOS benchmarks, and it achieves a good trade-off between accuracy and efficiency. Our code is available at https://github.com/liuziyang123/FAMINet.