 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLagrangian Grid-based Estimation of Nonlinear Systems with Invertible Dynamics
Jan 12, 2026This paper deals with the state estimation of non-linear and non-Gaussian systems with an emphasis on the numerical solution to the Bayesian recursive relations. In particular, this paper builds upon the Lagrangian grid-based filter (GbF) recently-developed for linear systems and extends it for systems with nonlinear dynamics that are invertible. The proposed nonlinear Lagrangian GbF reduces the computational complexity of the standard GbFs from quadratic to log-linear, while preserving all the strengths of the original GbF such as robustness, accuracy, and deterministic behaviour. The proposed filter is compared with the particle filter in several numerical studies using the publicly available MATLAB\textregistered\ implementation\footnote{https://github.com/pesslovany/Matlab-LagrangianPMF}.
Pedestrian Tracking with Monocular Camera using Unconstrained 3D Motion Model
Mar 18, 2024A first-principle single-object model is proposed for pedestrian tracking. It is assumed that the extent of the moving object can be described via known statistics in 3D, such as pedestrian height. The proposed model thus need not constrain the object motion in 3D to a common ground plane, which is usual in 3D visual tracking applications. A nonlinear filter for this model is implemented using the unscented Kalman filter (UKF) and tested using the publicly available MOT-17 dataset. The proposed solution yields promising results in 3D while maintaining perfect results when projected into the 2D image. Moreover, the estimation error covariance matches the true one. Unlike conventional methods, the introduced model parameters have convenient meaning and can readily be adjusted for a problem.
Hybrid Neural Network Augmented Physics-based Models for Nonlinear Filtering
Apr 13, 2022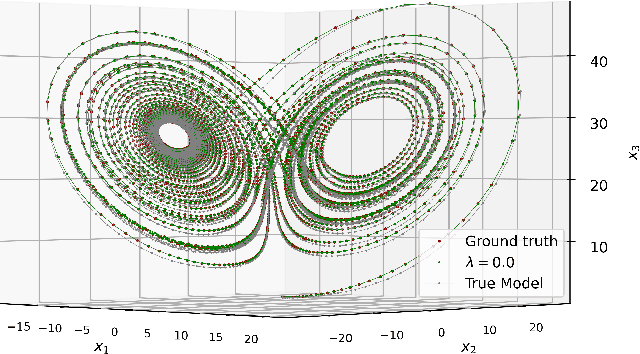
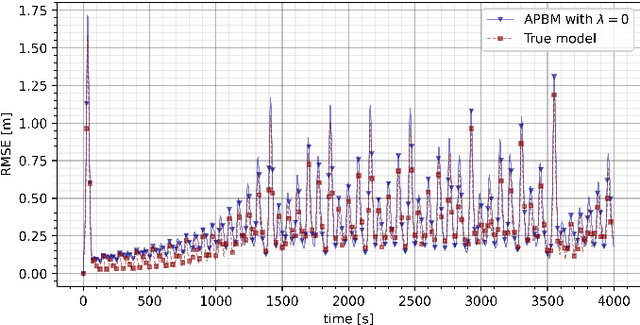
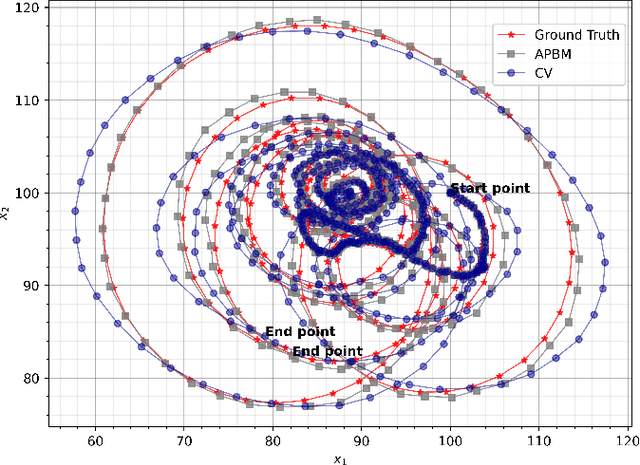
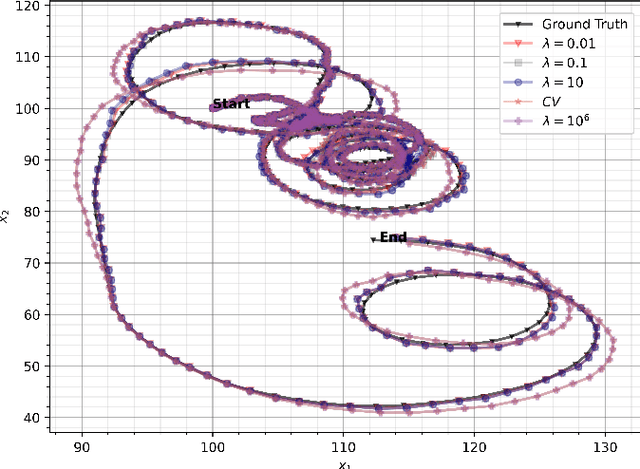
In this paper we present a hybrid neural network augmented physics-based modeling (APBM) framework for Bayesian nonlinear latent space estimation. The proposed APBM strategy allows for model adaptation when new operation conditions come into play or the physics-based model is insufficient (or incomplete) to properly describe the latent phenomenon. One advantage of the APBMs and our estimation procedure is the capability of maintaining the physical interpretability of estimated states. Furthermore, we propose a constraint filtering approach to control the neural network contributions to the overall model. We also exploit assumed density filtering techniques and cubature integration rules to present a flexible estimation strategy that can easily deal with nonlinear models and high-dimensional latent spaces. Finally, we demonstrate the efficacy of our methodology by leveraging a target tracking scenario with nonlinear and incomplete measurement and acceleration models, respectively.