 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChangeSim: Towards End-to-End Online Scene Change Detection in Industrial Indoor Environments
Mar 09, 2021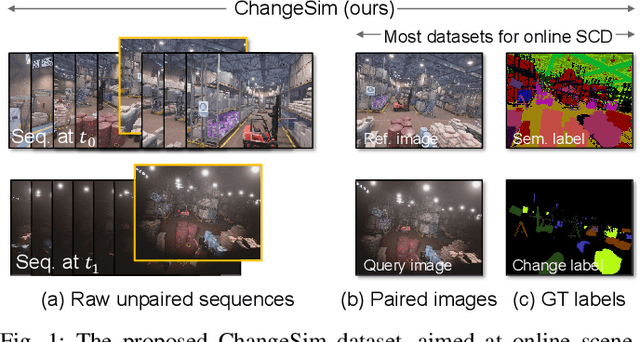

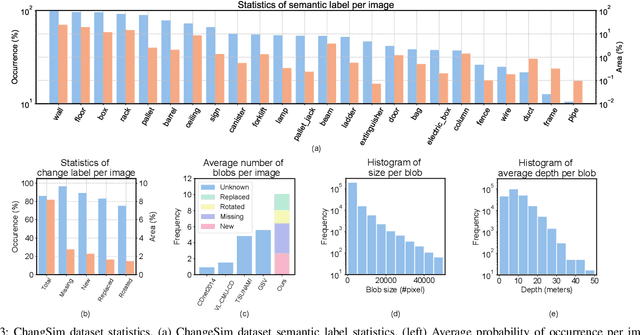
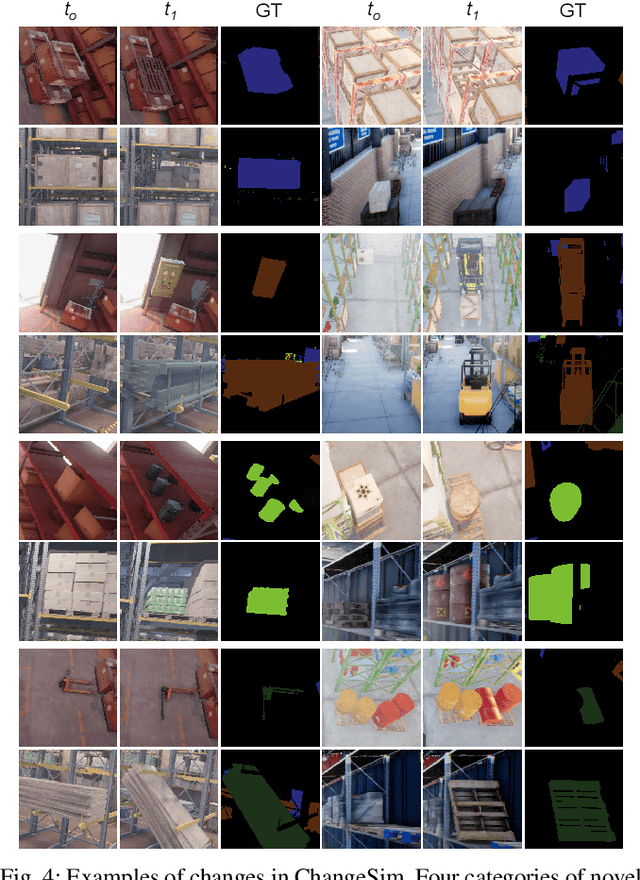
We present a challenging dataset, ChangeSim, aimed at online scene change detection (SCD) and more. The data is collected in photo-realistic simulation environments with the presence of environmental non-targeted variations, such as air turbidity and light condition changes, as well as targeted object changes in industrial indoor environments. By collecting data in simulations, multi-modal sensor data and precise ground truth labels are obtainable such as the RGB image, depth image, semantic segmentation, change segmentation, camera poses, and 3D reconstructions. While the previous online SCD datasets evaluate models given well-aligned image pairs, ChangeSim also provides raw unpaired sequences that present an opportunity to develop an online SCD model in an end-to-end manner, considering both pairing and detection. Experiments show that even the latest pair-based SCD models suffer from the bottleneck of the pairing process, and it gets worse when the environment contains the non-targeted variations. Our dataset is available at http://sammica.github.io/ChangeSim/.
3-D Scene Graph: A Sparse and Semantic Representation of Physical Environments for Intelligent Agents
Aug 14, 2019



Intelligent agents gather information and perceive semantics within the environments before taking on given tasks. The agents store the collected information in the form of environment models that compactly represent the surrounding environments. The agents, however, can only conduct limited tasks without an efficient and effective environment model. Thus, such an environment model takes a crucial role for the autonomy systems of intelligent agents. We claim the following characteristics for a versatile environment model: accuracy, applicability, usability, and scalability. Although a number of researchers have attempted to develop such models that represent environments precisely to a certain degree, they lack broad applicability, intuitive usability, and satisfactory scalability. To tackle these limitations, we propose 3-D scene graph as an environment model and the 3-D scene graph construction framework. The concise and widely used graph structure readily guarantees usability as well as scalability for 3-D scene graph. We demonstrate the accuracy and applicability of the 3-D scene graph by exhibiting the deployment of the 3-D scene graph in practical applications. Moreover, we verify the performance of the proposed 3-D scene graph and the framework by conducting a series of comprehensive experiments under various conditions.