 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping a Data-Driven Categorical Taxonomy of Emotional Expressions in Real World Human Robot Interactions
Mar 07, 2021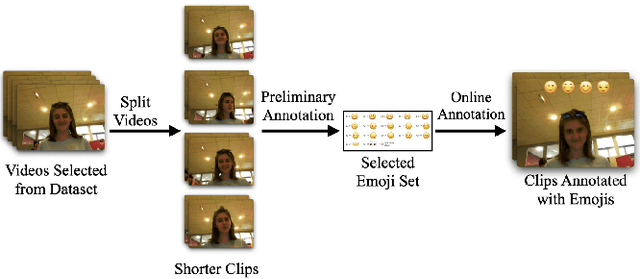
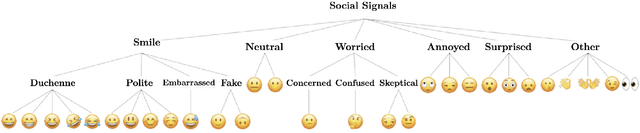
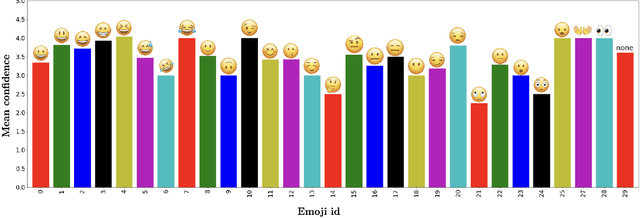
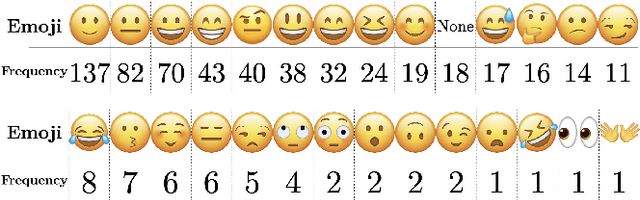
Emotions are reactions that can be expressed through a variety of social signals. For example, anger can be expressed through a scowl, narrowed eyes, a long stare, or many other expressions. This complexity is problematic when attempting to recognize a human's expression in a human-robot interaction: categorical emotion models used in HRI typically use only a few prototypical classes, and do not cover the wide array of expressions in the wild. We propose a data-driven method towards increasing the number of known emotion classes present in human-robot interactions, to 28 classes or more. The method includes the use of automatic segmentation of video streams into short (<10s) videos, and annotation using the large set of widely-understood emojis as categories. In this work, we showcase our initial results using a large in-the-wild HRI dataset (UE-HRI), with 61 clips randomly sampled from the dataset, labeled with 28 different emojis. In particular, our results showed that the "skeptical" emoji was a common expression in our dataset, which is not often considered in typical emotion taxonomies. This is the first step in developing a rich taxonomy of emotional expressions that can be used in the future as labels for training machine learning models, towards more accurate perception of humans by robots.
SFU-Store-Nav: A Multimodal Dataset for Indoor Human Navigation
Oct 28, 2020
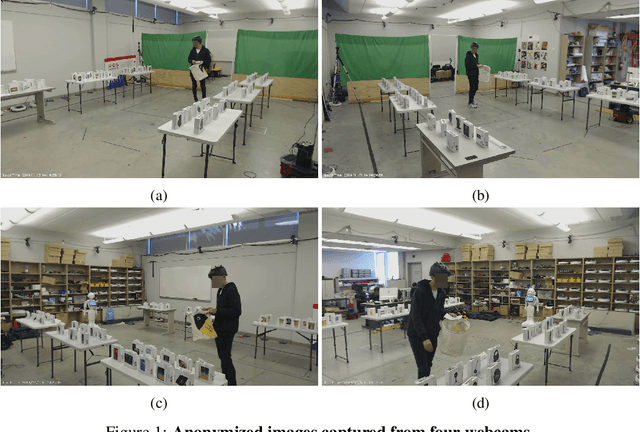
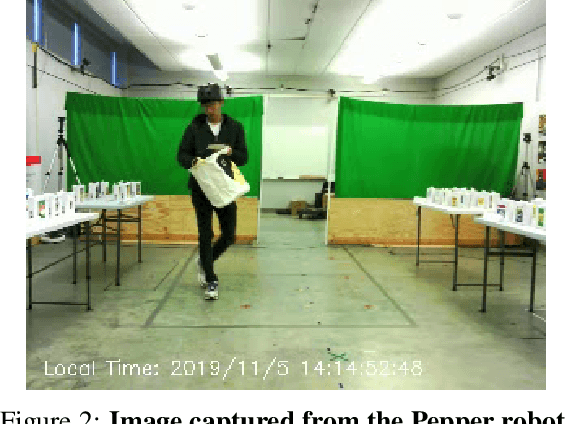
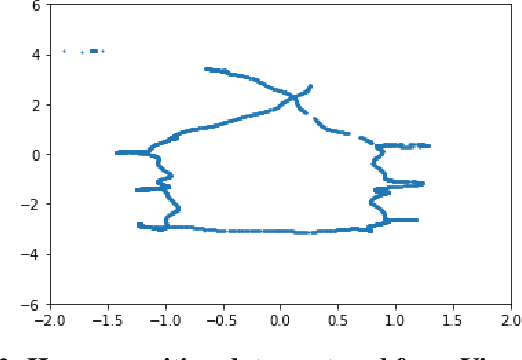
This article describes a dataset collected in a set of experiments that involves human participants and a robot. The set of experiments was conducted in the computing science robotics lab in Simon Fraser University, Burnaby, BC, Canada, and its aim is to gather data containing common gestures, movements, and other behaviours that may indicate humans' navigational intent relevant for autonomous robot navigation. The experiment simulates a shopping scenario where human participants come in to pick up items from his/her shopping list and interact with a Pepper robot that is programmed to help the human participant. We collected visual data and motion capture data from 108 human participants. The visual data contains live recordings of the experiments and the motion capture data contains the position and orientation of the human participants in world coordinates. This dataset could be valuable for researchers in the robotics, machine learning and computer vision community.