 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping a Data-Driven Categorical Taxonomy of Emotional Expressions in Real World Human Robot Interactions
Paper and Code
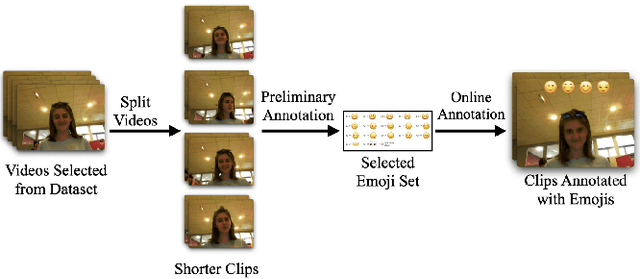
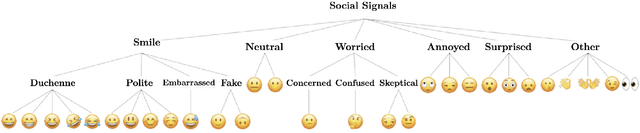
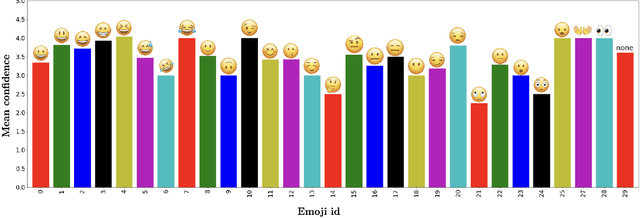
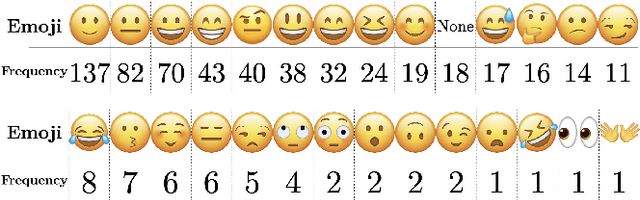
Emotions are reactions that can be expressed through a variety of social signals. For example, anger can be expressed through a scowl, narrowed eyes, a long stare, or many other expressions. This complexity is problematic when attempting to recognize a human's expression in a human-robot interaction: categorical emotion models used in HRI typically use only a few prototypical classes, and do not cover the wide array of expressions in the wild. We propose a data-driven method towards increasing the number of known emotion classes present in human-robot interactions, to 28 classes or more. The method includes the use of automatic segmentation of video streams into short (<10s) videos, and annotation using the large set of widely-understood emojis as categories. In this work, we showcase our initial results using a large in-the-wild HRI dataset (UE-HRI), with 61 clips randomly sampled from the dataset, labeled with 28 different emojis. In particular, our results showed that the "skeptical" emoji was a common expression in our dataset, which is not often considered in typical emotion taxonomies. This is the first step in developing a rich taxonomy of emotional expressions that can be used in the future as labels for training machine learning models, towards more accurate perception of humans by robots.