 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Exploration Method for Fast Unknown Environment Mapping by Using UAV Equipped with Limited FOV Sensor
Feb 05, 2023Autonomous exploration is one of the important parts to achieve the fast autonomous mapping and target search. However, most of the existing methods are facing low-efficiency problems caused by low-quality trajectory or back-and-forth maneuvers. To improve the exploration efficiency in unknown environments, a fast autonomous exploration planner (FAEP) is proposed in this paper. Different from existing methods, we firstly design a novel frontiers exploration sequence generation method to obtain a more reasonable exploration path, which considers not only the flight-level but frontier-level factors in the asymmetric traveling salesman problem (ATSP). Then, according to the exploration sequence and the distribution of frontiers, an adaptive yaw planning method is proposed to cover more frontiers by yaw change during an exploration journey. In addition, to increase the speed and fluency of flight, a dynamic replanning strategy is also adopted. We present sufficient comparison and evaluation experiments in simulation environments. Experimental results show the proposed exploration planner has better performance in terms of flight time and flight distance compared to typical and state-of-the-art methods. Moreover, the effectiveness of the proposed method is further evaluated in real-world environments.
A New Outlier Removal Strategy Based on Reliability of Correspondence Graph for Fast Point Cloud Registration
May 16, 2022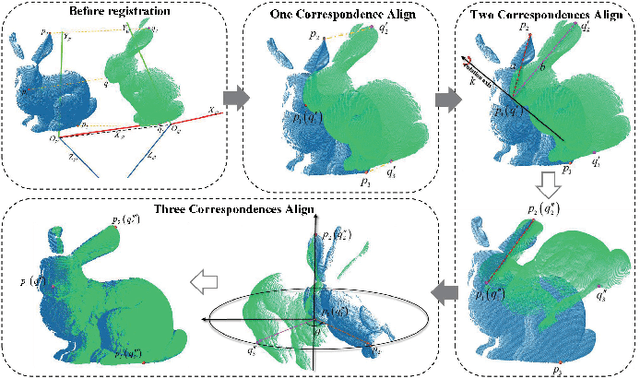
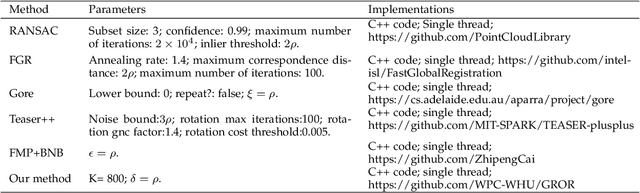
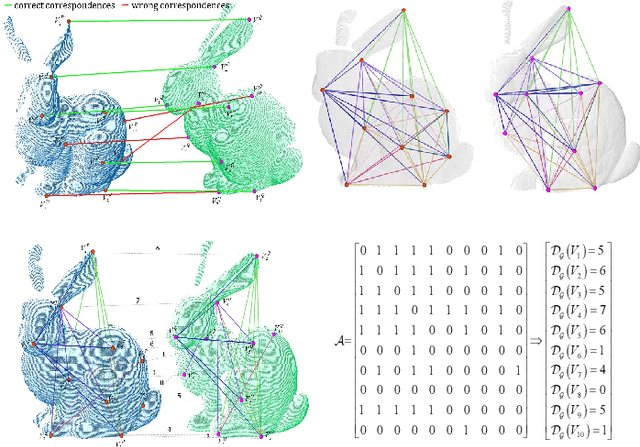
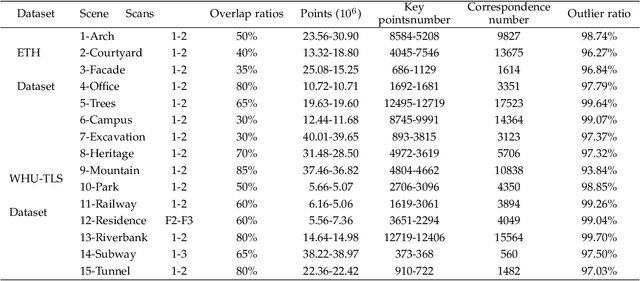
Registration is a basic yet crucial task in point cloud processing. In correspondence-based point cloud registration, matching correspondences by point feature techniques may lead to an extremely high outlier ratio. Current methods still suffer from low efficiency, accuracy, and recall rate. We use a simple and intuitive method to describe the 6-DOF (degree of freedom) curtailment process in point cloud registration and propose an outlier removal strategy based on the reliability of the correspondence graph. The method constructs the corresponding graph according to the given correspondences and designs the concept of the reliability degree of the graph node for optimal candidate selection and the reliability degree of the graph edge to obtain the global maximum consensus set. The presented method could achieve fast and accurate outliers removal along with gradual aligning parameters estimation. Extensive experiments on simulations and challenging real-world datasets demonstrate that the proposed method can still perform effective point cloud registration even the correspondence outlier ratio is over 99%, and the efficiency is better than the state-of-the-art. Code is available at https://github.com/WPC-WHU/GROR.