 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Imitation to Intuition: Intrinsic Reasoning for Open-Instance Video Classification
Mar 11, 2026Conventional video classification models, acting as effective imitators, excel in scenarios with homogeneous data distributions. However, real-world applications often present an open-instance challenge, where intra-class variations are vast and complex, beyond existing benchmarks. While traditional video encoder models struggle to fit these diverse distributions, vision-language models (VLMs) offer superior generalization but have not fully leveraged their reasoning capabilities (intuition) for such tasks. In this paper, we bridge this gap with an intrinsic reasoning framework that evolves open-instance video classification from imitation to intuition. Our approach, namely DeepIntuit, begins with a cold-start supervised alignment to initialize reasoning capability, followed by refinement using Group Relative Policy Optimization (GRPO) to enhance reasoning coherence through reinforcement learning. Crucially, to translate this reasoning into accurate classification, DeepIntuit then introduces an intuitive calibration stage. In this stage, a classifier is trained on this intrinsic reasoning traces generated by the refined VLM, ensuring stable knowledge transfer without distribution mismatch. Extensive experiments demonstrate that for open-instance video classification, DeepIntuit benefits significantly from transcending simple feature imitation and evolving toward intrinsic reasoning. Our project is available at https://bwgzk-keke.github.io/DeepIntuit/.
Co-GRU Enhanced End-to-End Design for Long-haul Coherent Transmission Systems
Apr 28, 2023In recent years, the end-to-end (E2E) scheme based on deep learning (DL), jointly optimizes the encoder and decoder parameters located of the system. Since the center-oriented Gated Recurrent Unit (Co-GRU) network structure satisfying gradient BP while having the ability to learn and compensate for intersymbol interference (ISI) with low computation cost, it is adopted for both the channel modeling and decoder implementation in the E2E design scheme proposed. Meanwhile, to obtain the constellation with the symmetrical distribution characteristic, the encoder and decoder are first E2E joint trained through NLIN model, and further trained on the Co-GRU channel replacing the SSFM channel as well as the subsequent digital signal processing (DSP) step. After the E2EDL process, the performance of the encoder and decoder trained is tested on the SSFM channel. For the E2E system with the Co-GRU based decoder, the gain of general mutual information (GMI) and the Q2-factor relative to the conventional QAM system, are respectively improved up to 0.2 bits/sym and 0.48dB for the long-haul 5-channel dual-polarization coherent system with 960 transmission distance at around the optimal launch power point. The work paves the way for the further study of the application for the Co-GRU structure in the data-driven E2E design of the experimental system, both for the channel modeling and the decoder performance improvement.
Multi-Drone based Single Object Tracking with Agent Sharing Network
Mar 16, 2020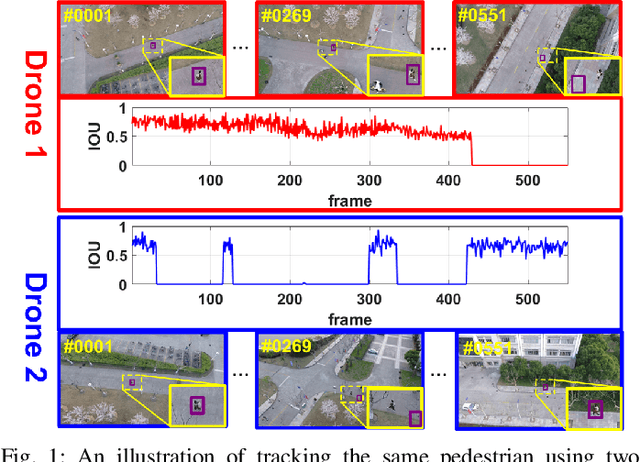
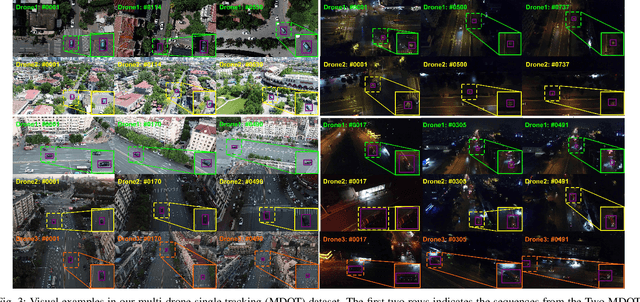
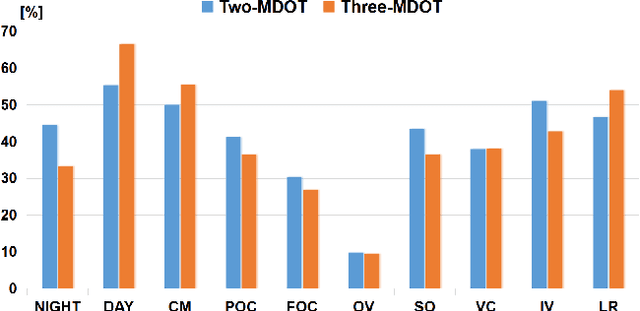
Drone equipped with cameras can dynamically track the target in the air from a broader view compared with static cameras or moving sensors over the ground. However, it is still challenging to accurately track the target using a single drone due to several factors such as appearance variations and severe occlusions. In this paper, we collect a new Multi-Drone single Object Tracking (MDOT) dataset that consists of 92 groups of video clips with 113,918 high resolution frames taken by two drones and 63 groups of video clips with 145,875 high resolution frames taken by three drones. Besides, two evaluation metrics are specially designed for multi-drone single object tracking, i.e. automatic fusion score (AFS) and ideal fusion score (IFS). Moreover, an agent sharing network (ASNet) is proposed by self-supervised template sharing and view-aware fusion of the target from multiple drones, which can improve the tracking accuracy significantly compared with single drone tracking. Extensive experiments on MDOT show that our ASNet significantly outperforms recent state-of-the-art trackers.