 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDensePose From WiFi
Dec 31, 2022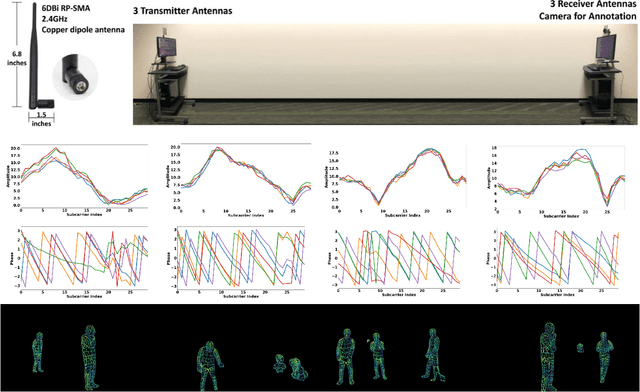
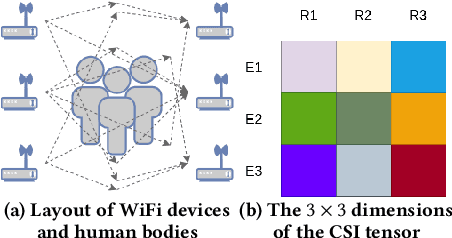


Advances in computer vision and machine learning techniques have led to significant development in 2D and 3D human pose estimation from RGB cameras, LiDAR, and radars. However, human pose estimation from images is adversely affected by occlusion and lighting, which are common in many scenarios of interest. Radar and LiDAR technologies, on the other hand, need specialized hardware that is expensive and power-intensive. Furthermore, placing these sensors in non-public areas raises significant privacy concerns. To address these limitations, recent research has explored the use of WiFi antennas (1D sensors) for body segmentation and key-point body detection. This paper further expands on the use of the WiFi signal in combination with deep learning architectures, commonly used in computer vision, to estimate dense human pose correspondence. We developed a deep neural network that maps the phase and amplitude of WiFi signals to UV coordinates within 24 human regions. The results of the study reveal that our model can estimate the dense pose of multiple subjects, with comparable performance to image-based approaches, by utilizing WiFi signals as the only input. This paves the way for low-cost, broadly accessible, and privacy-preserving algorithms for human sensing.
Understanding Human Hands in Contact at Internet Scale
Jun 11, 2020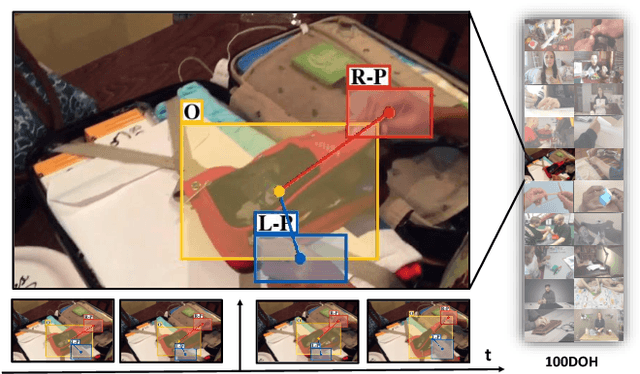
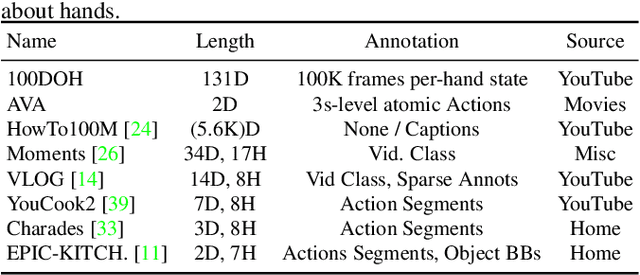
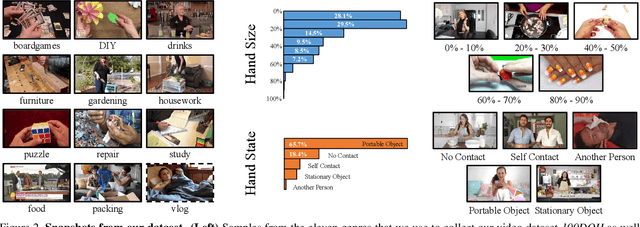
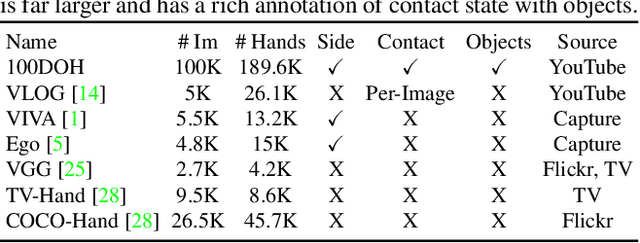
Hands are the central means by which humans manipulate their world and being able to reliably extract hand state information from Internet videos of humans engaged in their hands has the potential to pave the way to systems that can learn from petabytes of video data. This paper proposes steps towards this by inferring a rich representation of hands engaged in interaction method that includes: hand location, side, contact state, and a box around the object in contact. To support this effort, we gather a large-scale dataset of hands in contact with objects consisting of 131 days of footage as well as a 100K annotated hand-contact video frame dataset. The learned model on this dataset can serve as a foundation for hand-contact understanding in videos. We quantitatively evaluate it both on its own and in service of predicting and learning from 3D meshes of human hands.
Research on the fast Fourier transform of image based on GPU
May 29, 2015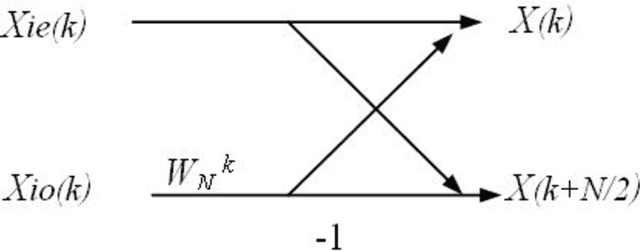
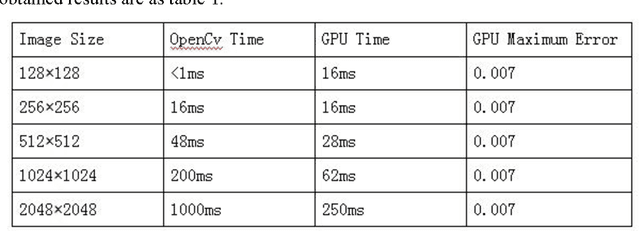
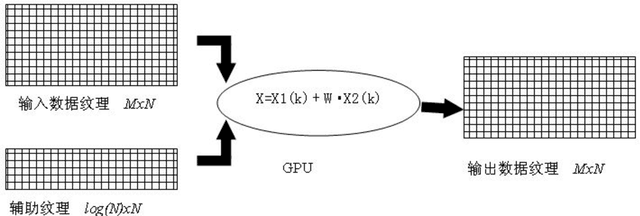
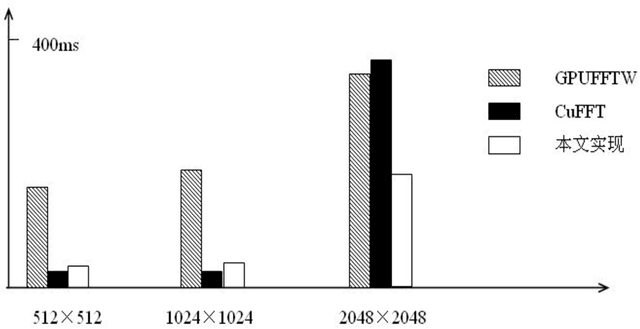
Study of general purpose computation by GPU (Graphics Processing Unit) can improve the image processing capability of micro-computer system. This paper studies the parallelism of the different stages of decimation in time radix 2 FFT algorithm, designs the butterfly and scramble kernels and implements 2D FFT on GPU. The experiment result demonstrates the validity and advantage over general CPU, especially in the condition of large input size. The approach can also be generalized to other transforms alike.