 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCGCV:Context Guided Correlation Volume for Optical Flow Neural Networks
Dec 20, 2022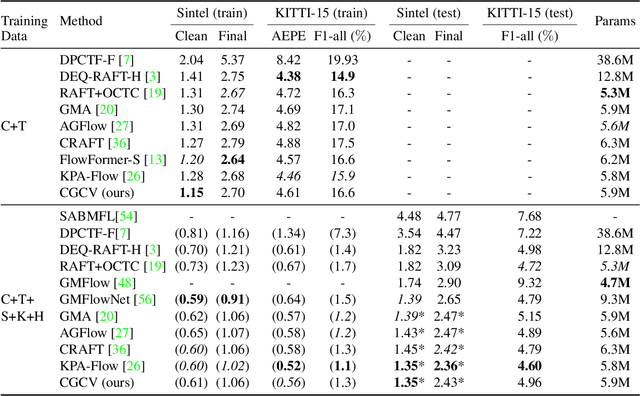
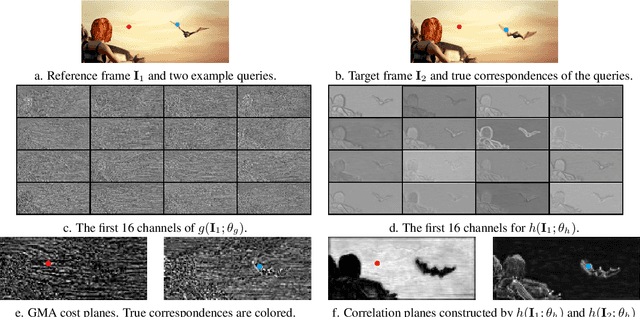
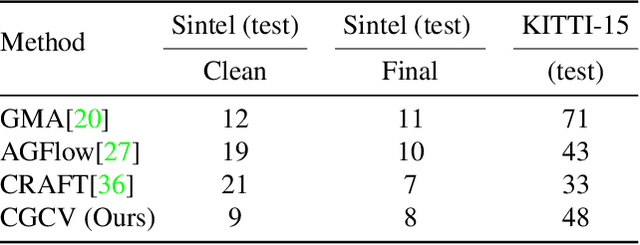
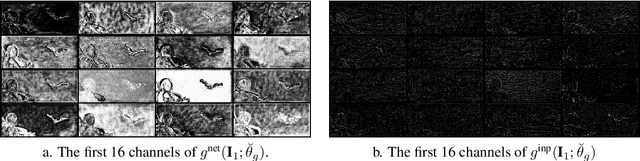
Optical flow, which computes the apparent motion from a pair of video frames, is a critical tool for scene motion estimation. Correlation volume is the central component of optical flow computational neural models. It estimates the pairwise matching costs between cross-frame features, and is then used to decode optical flow. However, traditional correlation volume is frequently noisy, outlier-prone, and sensitive to motion blur. We observe that, although the recent RAFT algorithm also adopts the traditional correlation volume, its additional context encoder provides semantically representative features to the flow decoder, implicitly compensating for the deficiency of the correlation volume. However, the benefits of this context encoder has been barely discussed or exploited. In this paper, we first investigate the functionality of RAFT's context encoder, then propose a new Context Guided Correlation Volume (CGCV) via gating and lifting schemes. CGCV can be universally integrated with RAFT-based flow computation methods for enhanced performance, especially effective in the presence of motion blur, de-focus blur and atmospheric effects. By incorporating the proposed CGCV with previous Global Motion Aggregation (GMA) method, at a minor cost of 0.5% extra parameters, the rank of GMA is lifted by 23 places on KITTI 2015 Leader Board, and 3 places on Sintel Leader Board. Moreover, at a similar model size, our correlation volume achieves competitive or superior performance to state of the art peer supervised models that employ Transformers or Graph Reasoning, as verified by extensive experiments.
A Secure and Efficient Multi-Object Grasping Detection Approach for Robotic Arms
Sep 08, 2022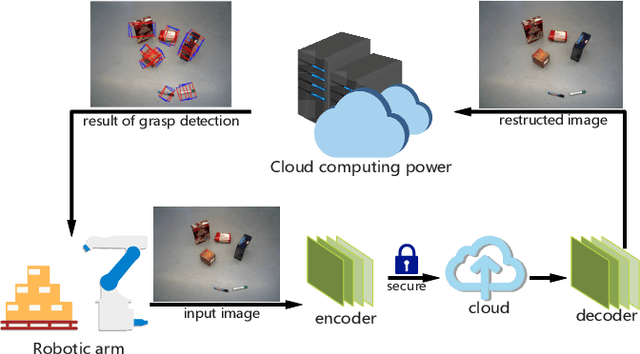
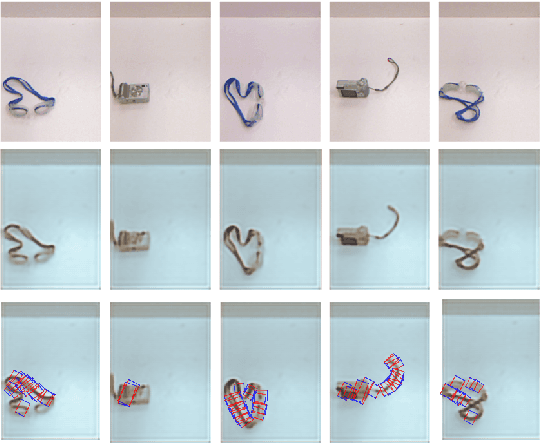
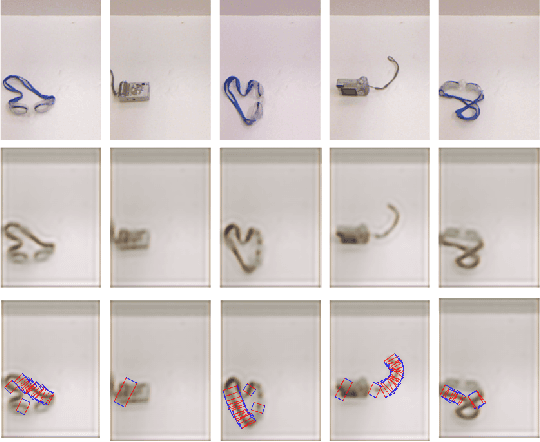
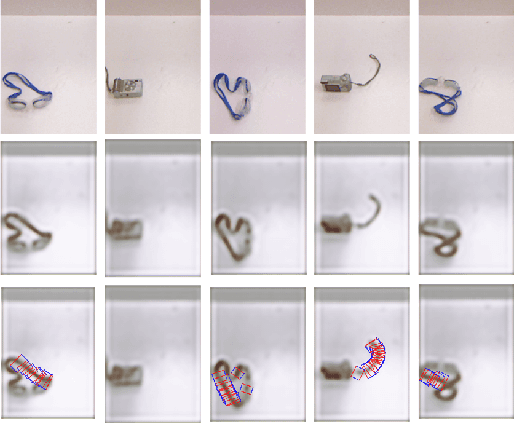
Robotic arms are widely used in automatic industries. However, with wide applications of deep learning in robotic arms, there are new challenges such as the allocation of grasping computing power and the growing demand for security. In this work, we propose a robotic arm grasping approach based on deep learning and edge-cloud collaboration. This approach realizes the arbitrary grasp planning of the robot arm and considers the grasp efficiency and information security. In addition, the encoder and decoder trained by GAN enable the images to be encrypted while compressing, which ensures the security of privacy. The model achieves 92% accuracy on the OCID dataset, the image compression ratio reaches 0.03%, and the structural difference value is higher than 0.91.