 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Quality Spatial Reconstruction and Orthoimage Generation Using Efficient 2D Gaussian Splatting
Mar 25, 2025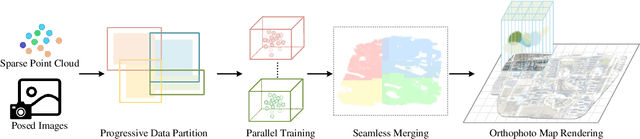
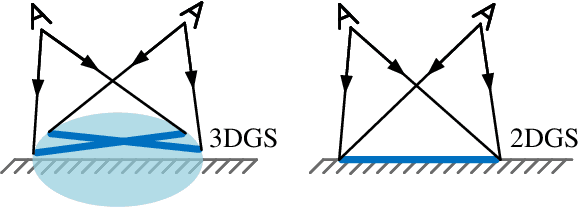
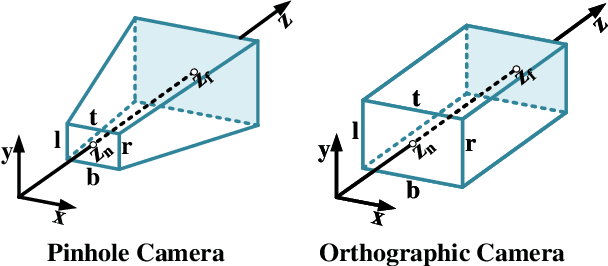
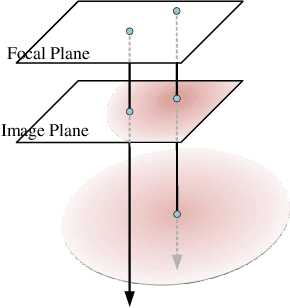
Highly accurate geometric precision and dense image features characterize True Digital Orthophoto Maps (TDOMs), which are in great demand for applications such as urban planning, infrastructure management, and environmental monitoring. Traditional TDOM generation methods need sophisticated processes, such as Digital Surface Models (DSM) and occlusion detection, which are computationally expensive and prone to errors. This work presents an alternative technique rooted in 2D Gaussian Splatting (2DGS), free of explicit DSM and occlusion detection. With depth map generation, spatial information for every pixel within the TDOM is retrieved and can reconstruct the scene with high precision. Divide-and-conquer strategy achieves excellent GS training and rendering with high-resolution TDOMs at a lower resource cost, which preserves higher quality of rendering on complex terrain and thin structure without a decrease in efficiency. Experimental results demonstrate the efficiency of large-scale scene reconstruction and high-precision terrain modeling. This approach provides accurate spatial data, which assists users in better planning and decision-making based on maps.
A Multi-Sensor Fusion Approach for Rapid Orthoimage Generation in Large-Scale UAV Mapping
Mar 05, 2025Rapid generation of large-scale orthoimages from Unmanned Aerial Vehicles (UAVs) has been a long-standing focus of research in the field of aerial mapping. A multi-sensor UAV system, integrating the Global Positioning System (GPS), Inertial Measurement Unit (IMU), 4D millimeter-wave radar and camera, can provide an effective solution to this problem. In this paper, we utilize multi-sensor data to overcome the limitations of conventional orthoimage generation methods in terms of temporal performance, system robustness, and geographic reference accuracy. A prior-pose-optimized feature matching method is introduced to enhance matching speed and accuracy, reducing the number of required features and providing precise references for the Structure from Motion (SfM) process. The proposed method exhibits robustness in low-texture scenes like farmlands, where feature matching is difficult. Experiments show that our approach achieves accurate feature matching orthoimage generation in a short time. The proposed drone system effectively aids in farmland detection and management.