 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane detection with Position Embedding
Mar 23, 2022
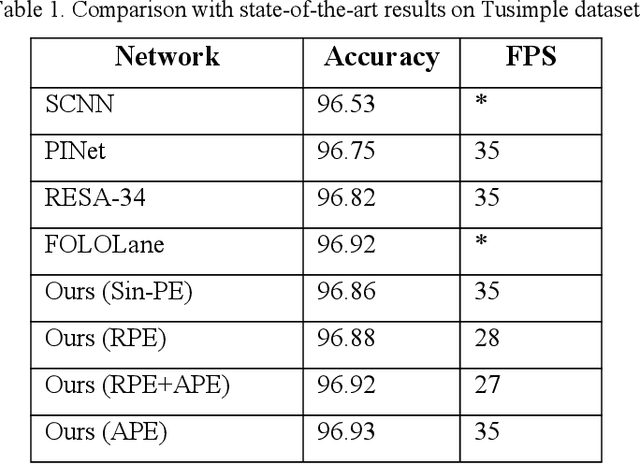
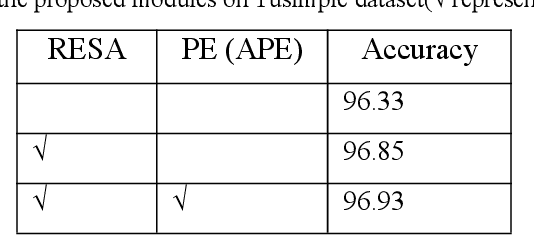
Recently, lane detection has made great progress in autonomous driving. RESA (REcurrent Feature-Shift Aggregator) is based on image segmentation. It presents a novel module to enrich lane feature after preliminary feature extraction with an ordinary CNN. For Tusimple dataset, there is not too complicated scene and lane has more prominent spatial features. On the basis of RESA, we introduce the method of position embedding to enhance the spatial features. The experimental results show that this method has achieved the best accuracy 96.93% on Tusimple dataset.
Improving Deep Image Matting Via Local Smoothness Assumption
Dec 27, 2021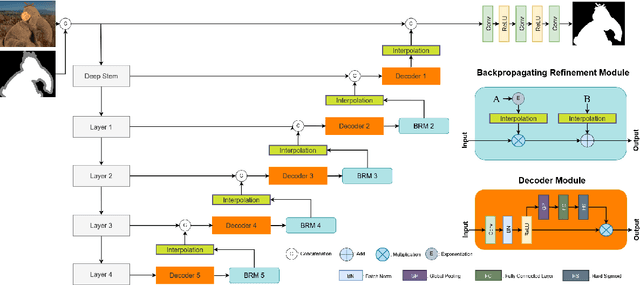
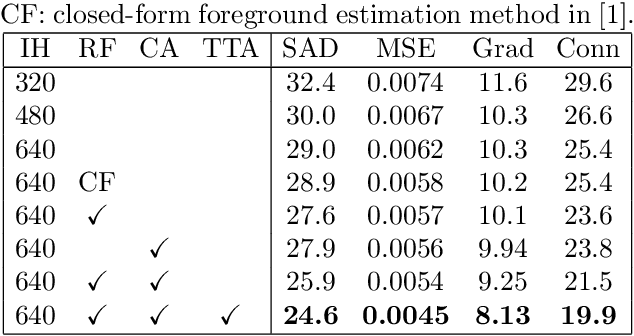
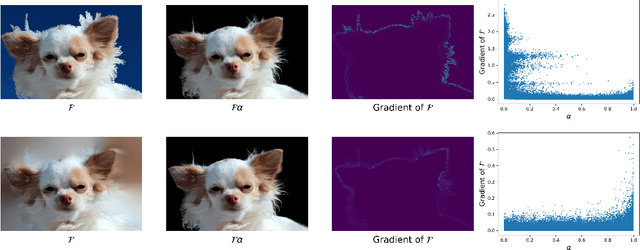
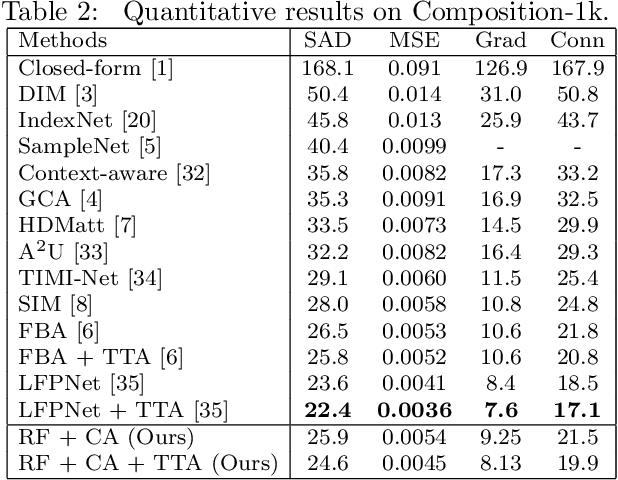
Natural image matting is a fundamental and challenging computer vision task. Conventionally, the problem is formulated as an underconstrained problem. Since the problem is ill-posed, further assumptions on the data distribution are required to make the problem well-posed. For classical matting methods, a commonly adopted assumption is the local smoothness assumption on foreground and background colors. However, the use of such assumptions was not systematically considered for deep learning based matting methods. In this work, we consider two local smoothness assumptions which can help improving deep image matting models. Based on the local smoothness assumptions, we propose three techniques, i.e., training set refinement, color augmentation and backpropagating refinement, which can improve the performance of the deep image matting model significantly. We conduct experiments to examine the effectiveness of the proposed algorithm. The experimental results show that the proposed method has favorable performance compared with existing matting methods.