 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Production Logistics to Smart Manufacturing: The Vision for a New RoboCup Industrial League
Jul 15, 2025The RoboCup Logistics League is a RoboCup competition in a smart factory scenario that has focused on task planning, job scheduling, and multi-agent coordination. The focus on production logistics allowed teams to develop highly competitive strategies, but also meant that some recent developments in the context of smart manufacturing are not reflected in the competition, weakening its relevance over the years. In this paper, we describe the vision for the RoboCup Smart Manufacturing League, a new competition designed as a larger smart manufacturing scenario, reflecting all the major aspects of a modern factory. It will consist of several tracks that are initially independent but gradually combined into one smart manufacturing scenario. The new tracks will cover industrial robotics challenges such as assembly, human-robot collaboration, and humanoid robotics, but also retain a focus on production logistics. We expect the reenvisioned competition to be more attractive to newcomers and well-tried teams, while also shifting the focus to current and future challenges of industrial robotics.
Intelligent flat-and-textureless object manipulation in Service Robots
Sep 10, 2018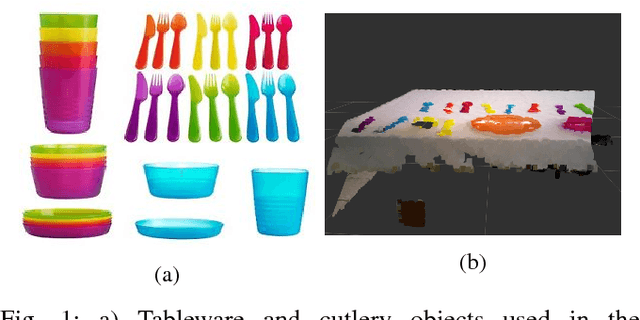
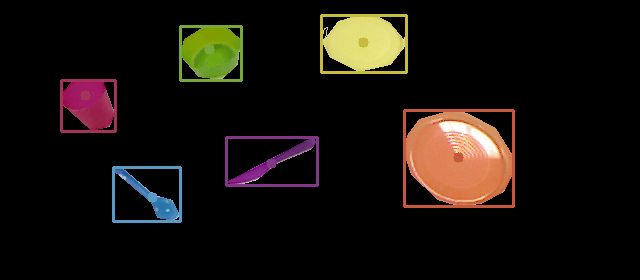
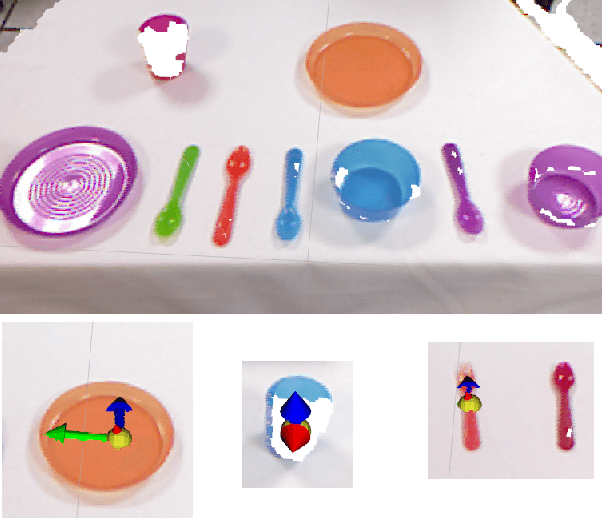
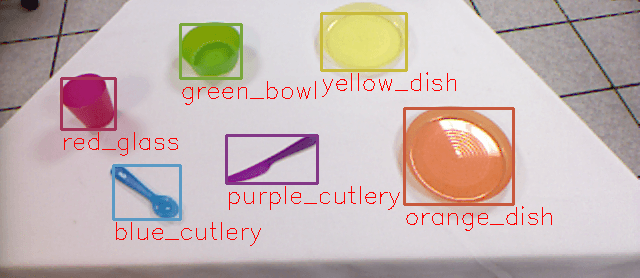
This work introduces our approach to the flat and textureless object grasping problem. In particular, we address the tableware and cutlery manipulation problem where a service robot has to clean up a table. Our solution integrates colour and 2D and 3D geometry information to describe objects, and this information is given to the robot action planner to find the best grasping trajectory depending on the object class. Furthermore, we use visual feedback as a verification step to determine if the grasping process has successfully occurred. We evaluate our approach in both an open and a standard service robot platform following the RoboCup@Home international tournament regulations.
Marimba: A Tool for Verifying Properties of Hidden Markov Models
Oct 28, 2015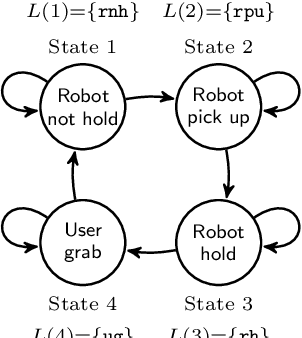
The formal verification of properties of Hidden Markov Models (HMMs) is highly desirable for gaining confidence in the correctness of the model and the corresponding system. A significant step towards HMM verification was the development by Zhang et al. of a family of logics for verifying HMMs, called POCTL*, and its model checking algorithm. As far as we know, the verification tool we present here is the first one based on Zhang et al.'s approach. As an example of its effective application, we verify properties of a handover task in the context of human-robot interaction. Our tool was implemented in Haskell, and the experimental evaluation was performed using the humanoid robot Bert2.