 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing a Novel COVID-19 Calculator to Measure Positive U.S. Socio-Economic Impact of a COVID-19 Pre-Screening Solution
Jan 21, 2022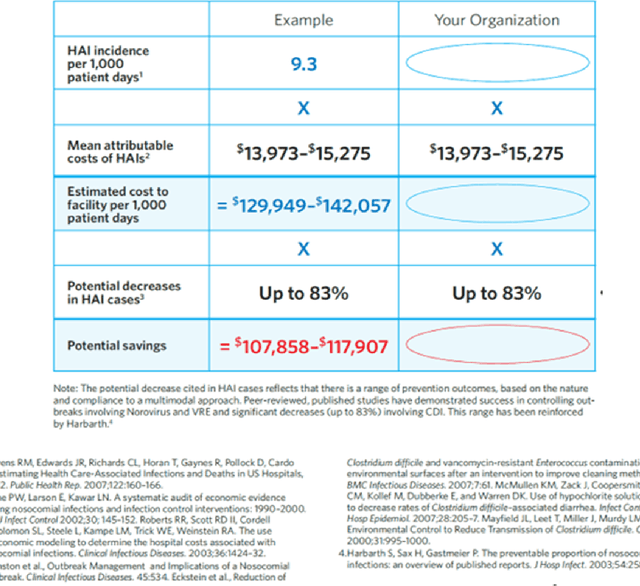
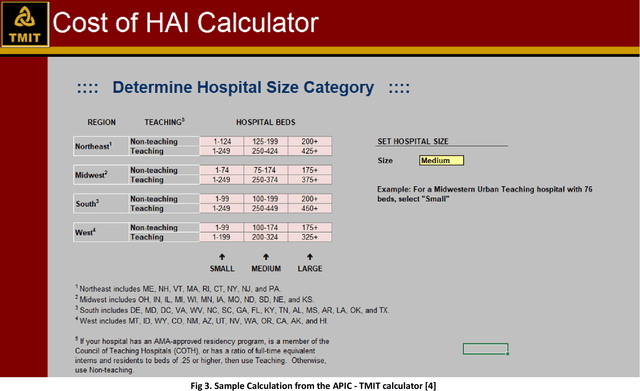
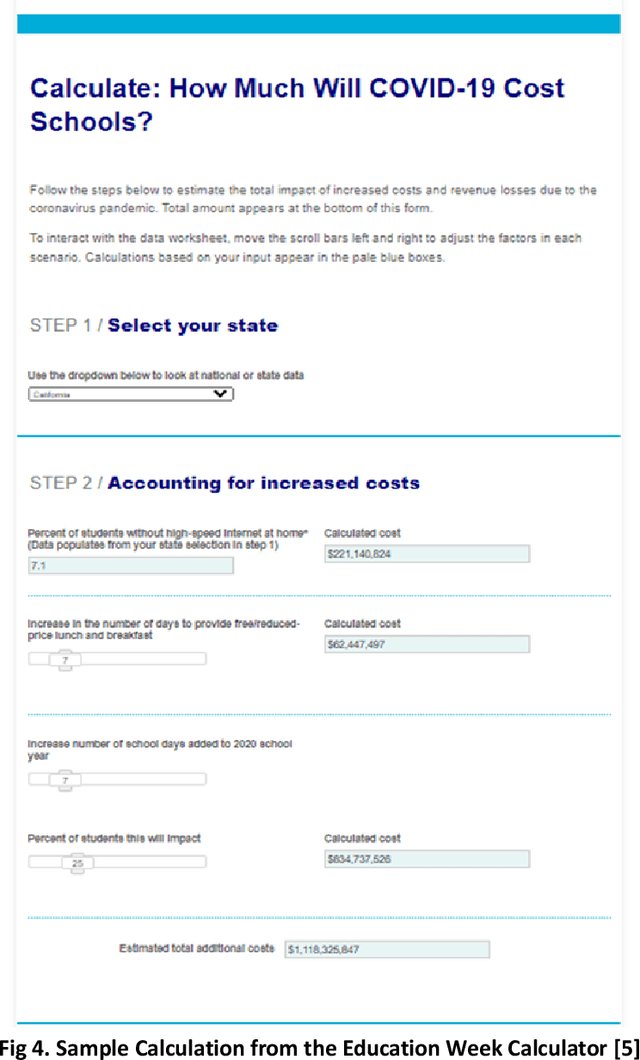
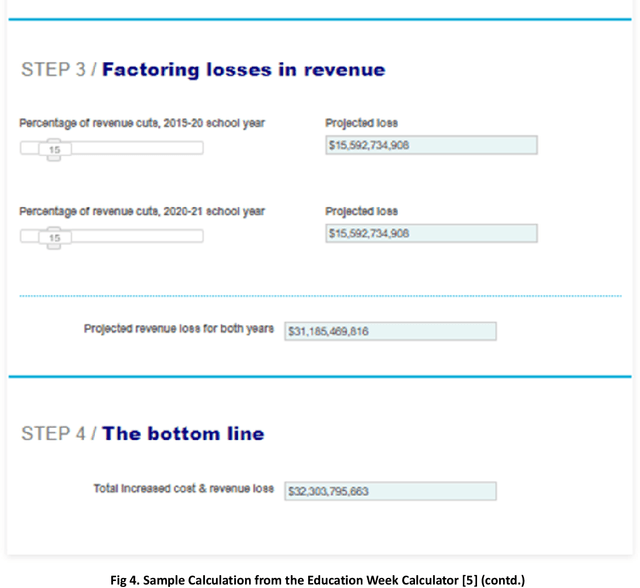
The COVID-19 pandemic has been a scourge upon humanity, claiming the lives of more than 5.1 million people worldwide; the global economy contracted by 3.5% in 2020. This paper presents a COVID-19 calculator, synthesizing existing published calculators and data points, to measure the positive U.S. socio-economic impact of a COVID-19 AI/ML pre-screening solution (algorithm & application).
Intelligent flat-and-textureless object manipulation in Service Robots
Sep 10, 2018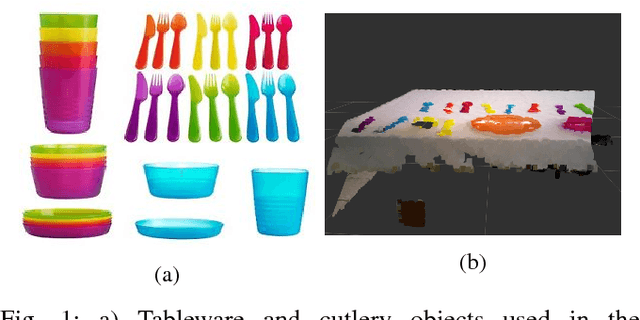
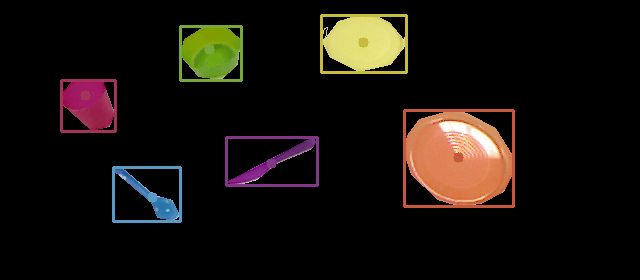
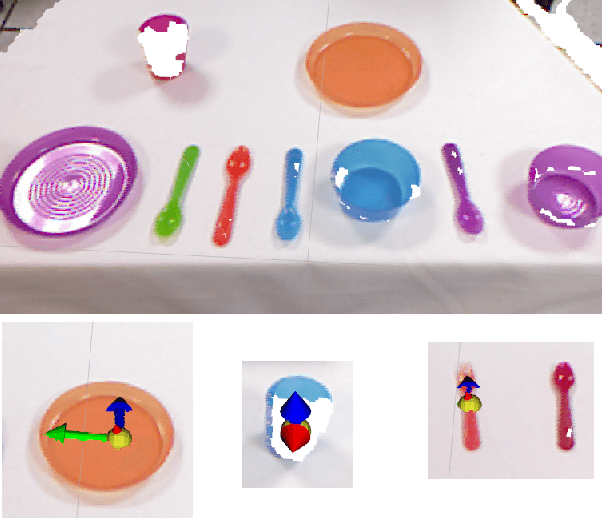
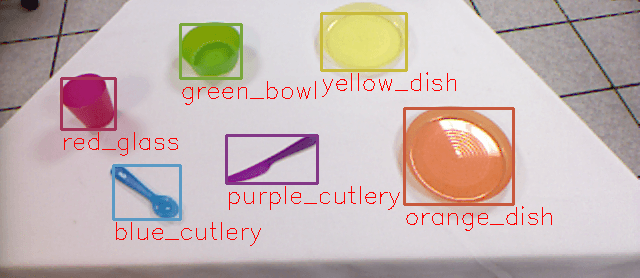
This work introduces our approach to the flat and textureless object grasping problem. In particular, we address the tableware and cutlery manipulation problem where a service robot has to clean up a table. Our solution integrates colour and 2D and 3D geometry information to describe objects, and this information is given to the robot action planner to find the best grasping trajectory depending on the object class. Furthermore, we use visual feedback as a verification step to determine if the grasping process has successfully occurred. We evaluate our approach in both an open and a standard service robot platform following the RoboCup@Home international tournament regulations.